About
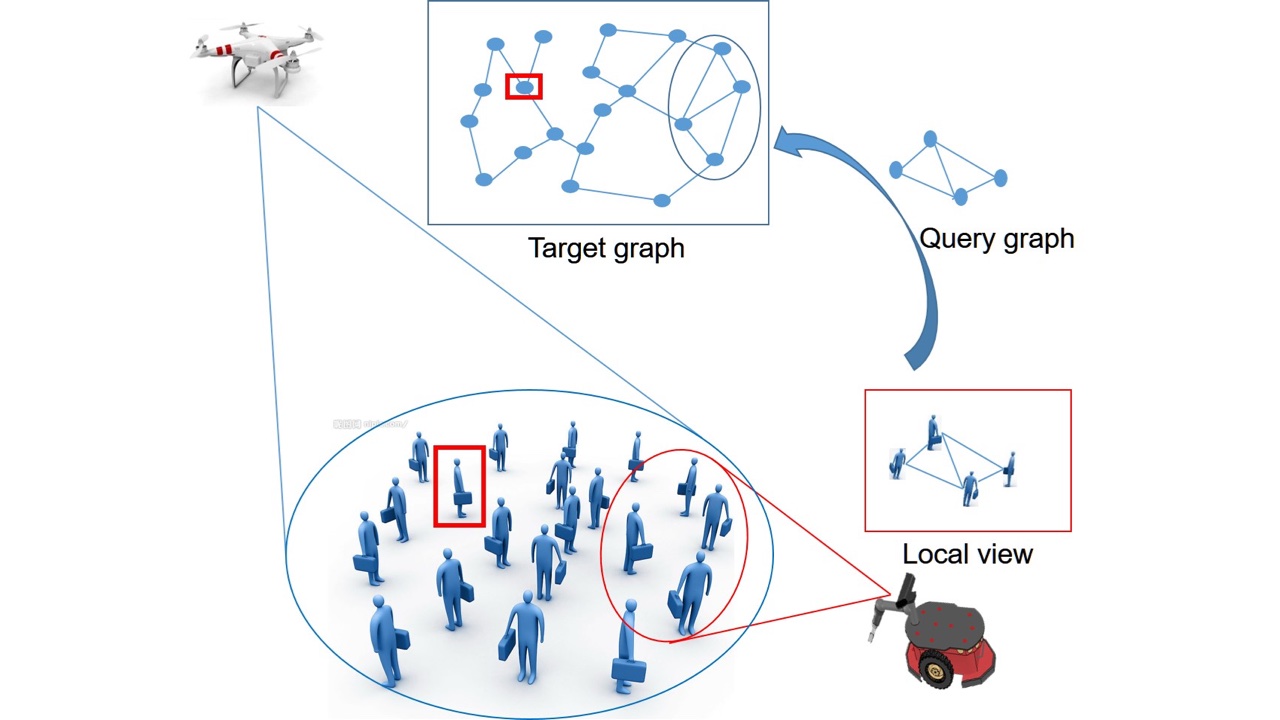
Cognitive sharing of objects or an environment is fundamental in cooperative task experimented with multiple robots. Particularly, the viewpoint of a UAV is significantly different with a ground robot, the color or shape information cannot be shared between a flying and ground mobile robot. That makes it difficult to realize cognitive sharing. In this study, we deal with the problem by sharing geometric relation-based representation between the UAV and the ground robot. In our method, the UAV selects geometric relation-based triangle representation according to the entropy based representation selecting method and shares the representation with the ground robot in order to make cognitive sharing. Furthermore, we develop the edge-label subgraph matching method for a UAV to navigates a ground robot to a desired position in order to process cognitive sharing.
Publications
- Y.Cai and K.Sekiyama: "Cooperative System for UAV and Ground Robot based on Cognitive Sharing", The 2015 Conference on Technologies and Applications of Artificial Intelligence (TAAI), Vol. 68, pp. 21–35, 2015
- Y.Cai and K.Sekiyama: "Geometric Relation Matching based Object Identification for UAV and UGV Cooperation", 第28回自律分散システム・シンポジウム, 1B1-4, 2016