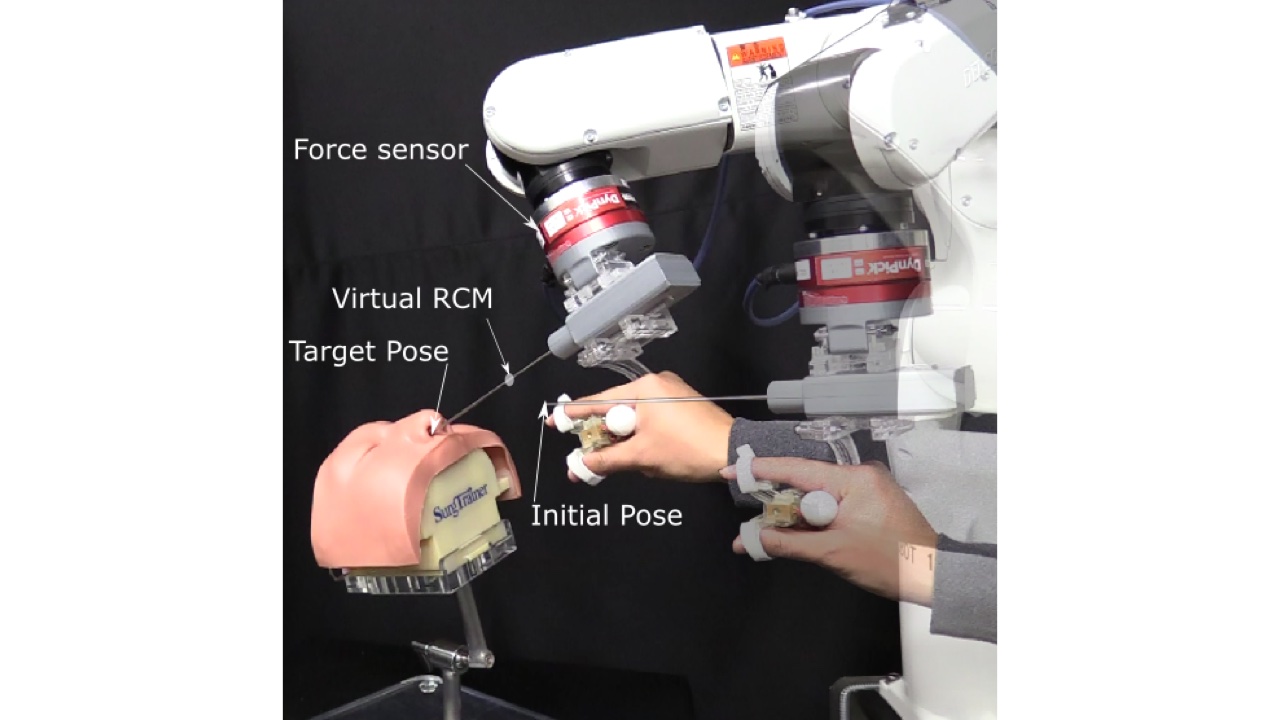
The current research is focus on the development of cooperative surgery systems based on force control.