概要
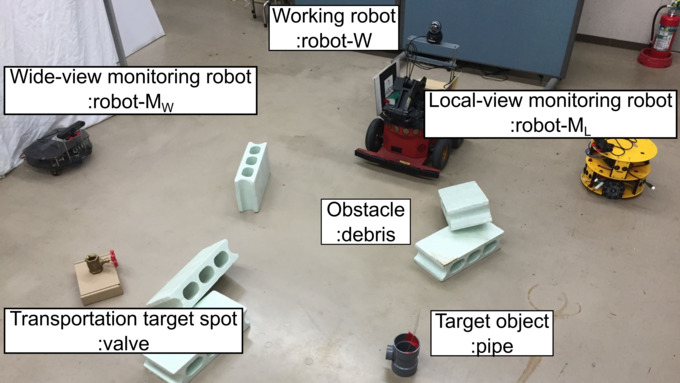
本研究は、自律モニタリングロボットによる遠隔操作支援のためのROI選択システムの開発を目的としている. ROI選択とは、ロボットが観測する空間から注視すべき領域を選択することである. 適応的なROI選択を行うことで、遠隔操作の効率・操作性の向上が実現される. 操作者が遠隔操作を行う上で、見たい空間をロボットが認識するためにゲシュタルト心理学を応用した物体間関係性アルゴリズムの開発を行っている.
業績
- S.Samejima and K.Sekiyama: "Multi-Robot Visual Support System by Adaptive ROI Selection Based on Gestalt Perception", IEEE International Conference on Robotics and Automation (ICRA), 2016 (to be appeared)