概要
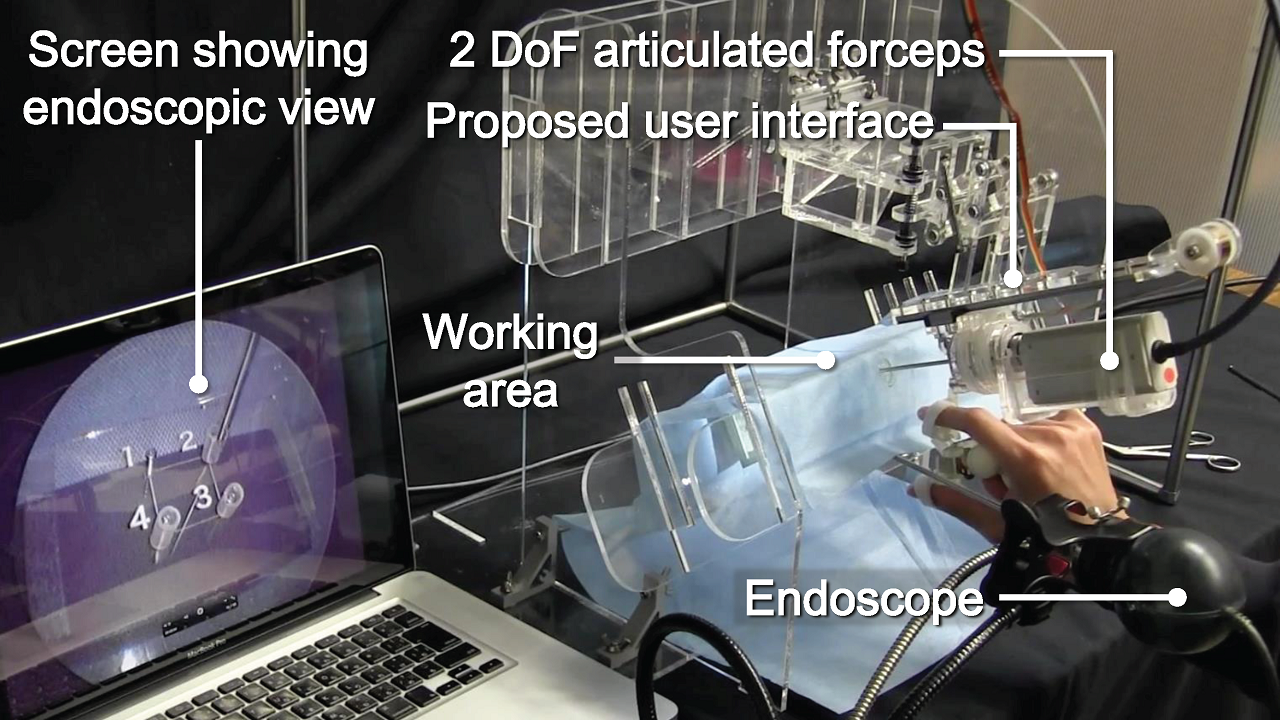
手術支援ロボットを直感的に操作するインターフェースの研究開発を行っています。本操作インターフェースによって、鉗子支持デバイスに搭載した多自由度能動鉗子を直感的の操作することを目標としています。まず、鉗子支持デバイスには不動点(RCM)と免荷機能を設け、鼻腔での干渉を避け、また、多自由度能動鉗子の重さを感じることなく能動鉗子を狭小な空間で操作できます。また、操作インターフェースによって、掌で能動鉗子の先端位置・姿勢(4自由度)を操作し、指先で能動鉗子先端の屈曲自由度(2自由度)、把持(1自由度)、回転(1自由度)を操作できます。能動鉗子の位置・姿勢を直接操作することで鉗子先端の接触感覚を術者に直接伝達でき,直感的に鉗子を操作することが出来き、安全で微細な手術作業を実現します。
業績
- 第17回 計測自動制御学会システムインテグレーション部門講演会 (SI2016)、SI2016優秀講演賞 受賞
- 多自由度能動鉗子操作インターフェースにおける重力補償機構の開発および評価,魚住大輔、中西淳、青山忠義、長谷川泰久、1P1-K0、ロボティクス・メカトロニクス講演会2018
- 接触感覚を有する能動鉗子直接操作インタフェースの操作性評価,佐藤雄一朗, 中西淳, 長谷川泰久、2A1-O11、ロボティクス・メカトロニクス講演会2017