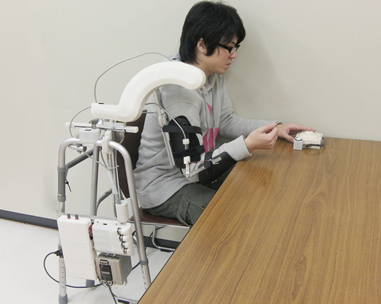
筋ジストロフィーなどの筋疾患によって上肢の筋力が低下した患者さんが、介助者の手を借りずに食事がとれるよう支援するシステムです。患者さんの残存機能 を活用するために、動かすことのできる部位を使って操作します。患者さんは症状に合ったユーザインタフェースを選択し,自動制御モードと手動制御モードを 使いながら食事を行います.
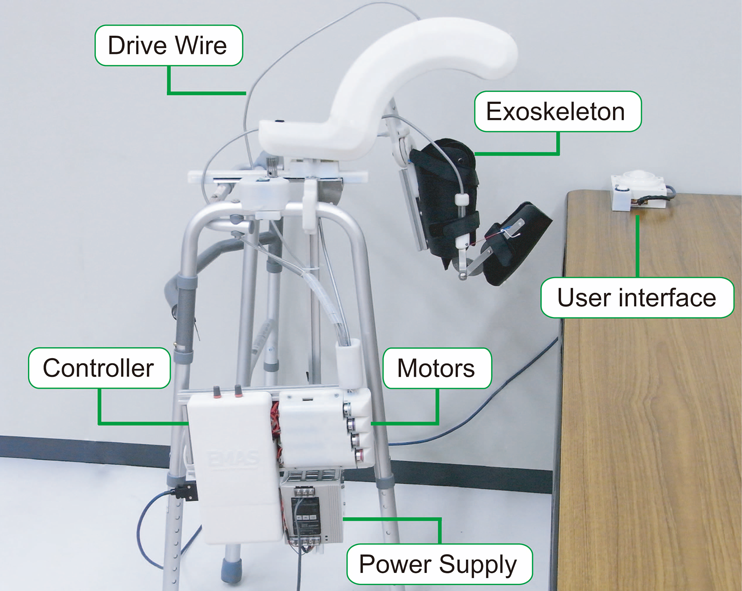
このシステムは,外骨格部,ユーザインタフェース,駆動ユニット(モータ,モータドライバ,ギアヘッド,エンコーダ),コントローラ,電源からなります.ユーザインタフェースを除くすべてのパーツは平行歩行器を改良したスタンドに取り付けられています.また各関節の駆動にはワイヤ駆動を用いており,関節部の小型軽量化を実現しています.テーブル上のユーザインタフェースは後述する複数種類から,患者の残存機能に合わせて選択することが可能であり,外骨格を装着した腕とは反対側の手指を用いて操作します.
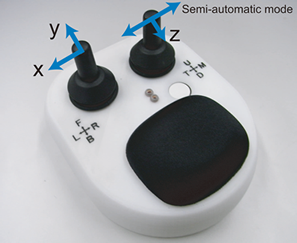
■ジョイスティック
指先の機能が残っている患者さんが使用します.後に紹介するトラックボールに比べ操作が簡単で,より症状が進行した患者さん向けです.左のジョイスティックによって手先を前後左右に動かすことができます.また、右のジョイスティックによって手先を上下に動か したり、自動制御モードと手動制御モードを切り替えたりすることができます.
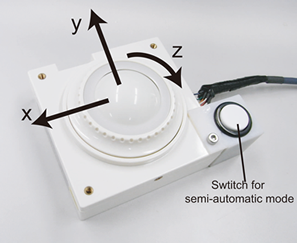
■トラックボール
手先の機能が残っている患者さんが使用します.ボールを転がすことで手先を前後左右に動かすことができます。また,ボール周囲のダイヤルを操作することで手先を上下に動かしたり,自動制御モードと手動制御モードを切り替えたりすることができます.
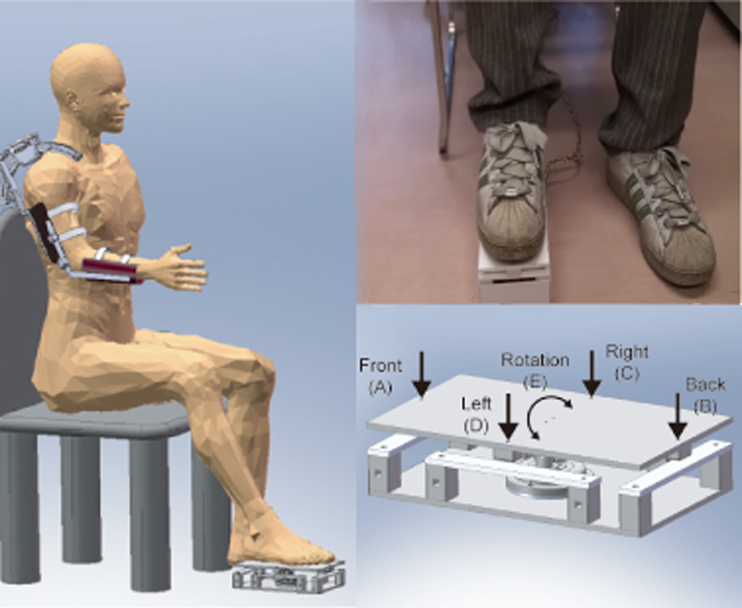
■フットコントローラ
足の機能が残っている患者さんが使用します。ペダルを踏むことにより,手先を前後左右に動かすことができます.また、足をひねってペダルを回転させることで,自動制御モードと手動制御モードを切り替えることができます.