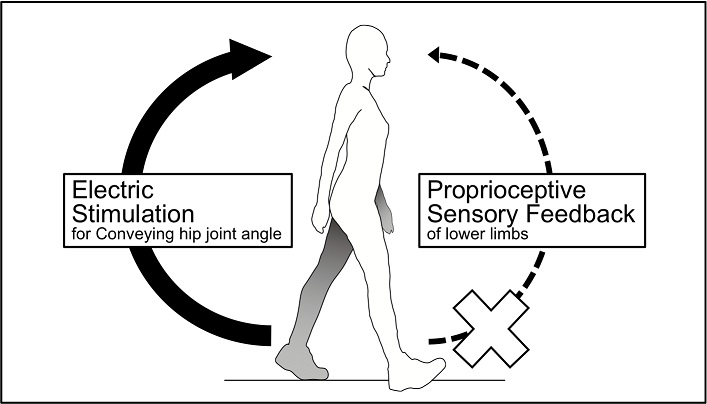
近年,人間の歩行能力を支援する外骨格型ロボットが数多く開発されています.その中には,完全下肢麻痺患者でも使用可能な指先を使って歩行を制御する装置も存在します.しかし,完全下肢麻痺患者には下肢の触覚や深部感覚が失われているため,歩行状態を目視により確認をしなければならなりません.これは歩行動作を妨げる要因です.本研究では電気刺激を用いて,歩行時の下半身の状態を麻痺していない上肢(主に手)へフィードバックすることにより,健常者と同様のスムーズな歩行を実現することを目標に取り組んでいます.
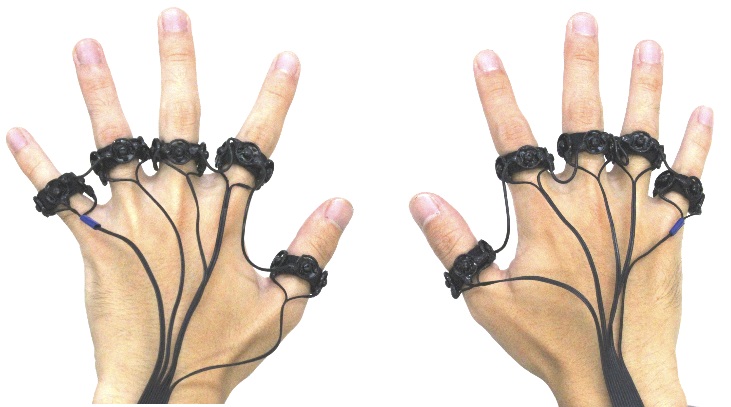
電気刺激による提示は,機械的振動に比べて,小型化が容易かつ低消費電力な装置を実現することが可能です.また,刺激による痛みの無いように,低周波のものを用いるとともに,個々に合わせて刺激強度を設定するようにしました.
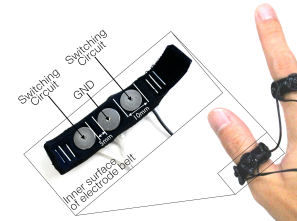
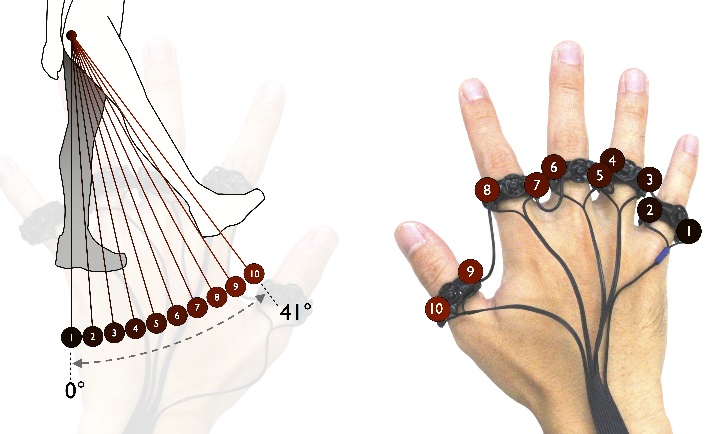
下肢状態の上肢へのフィードバックの手始めとして,股関節角度のフィードバックを行なっています.左右股関節の 2 自由度情報を 1 つにまとめて提示できる手法として,左右股関節の相対角度を電気刺激で指に提示します.右脚の股関節角度が左足に比べ大きい場合,右手に電気刺激を提示し,左脚の股関節角度が右脚に比べ大きい場合,左手に電気刺激を提示します.