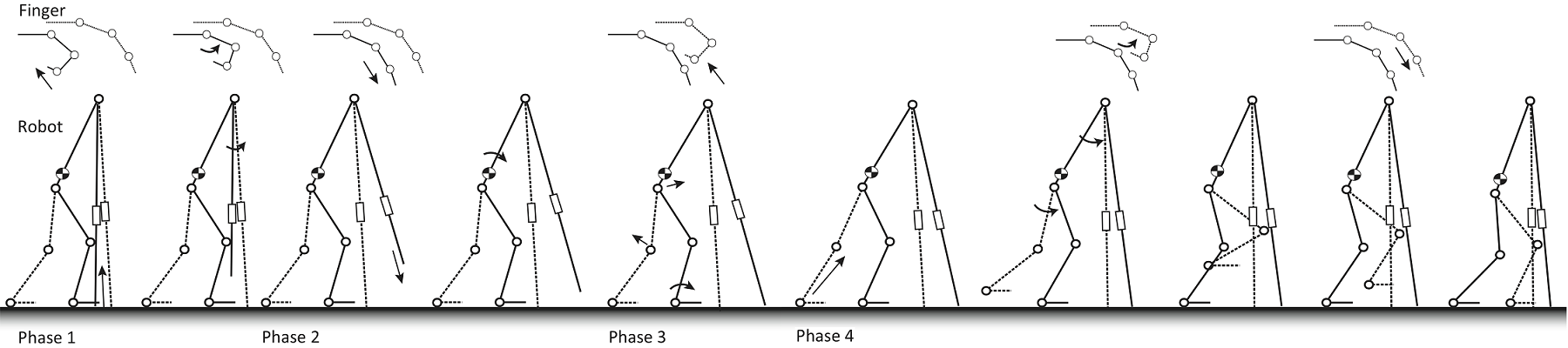
両示指に装着した指操作型インタフェースにより歩行支援ロボットを操作します.指先の位置とロボットの足先の位置を対応させることで,歩幅,足の高さを任意の位置に変更することを可能にしました.また,歩行支援ロボットの足底からの床反力情報を指先に力覚提示することで,接地,不接地の歩行状況を把握できます.
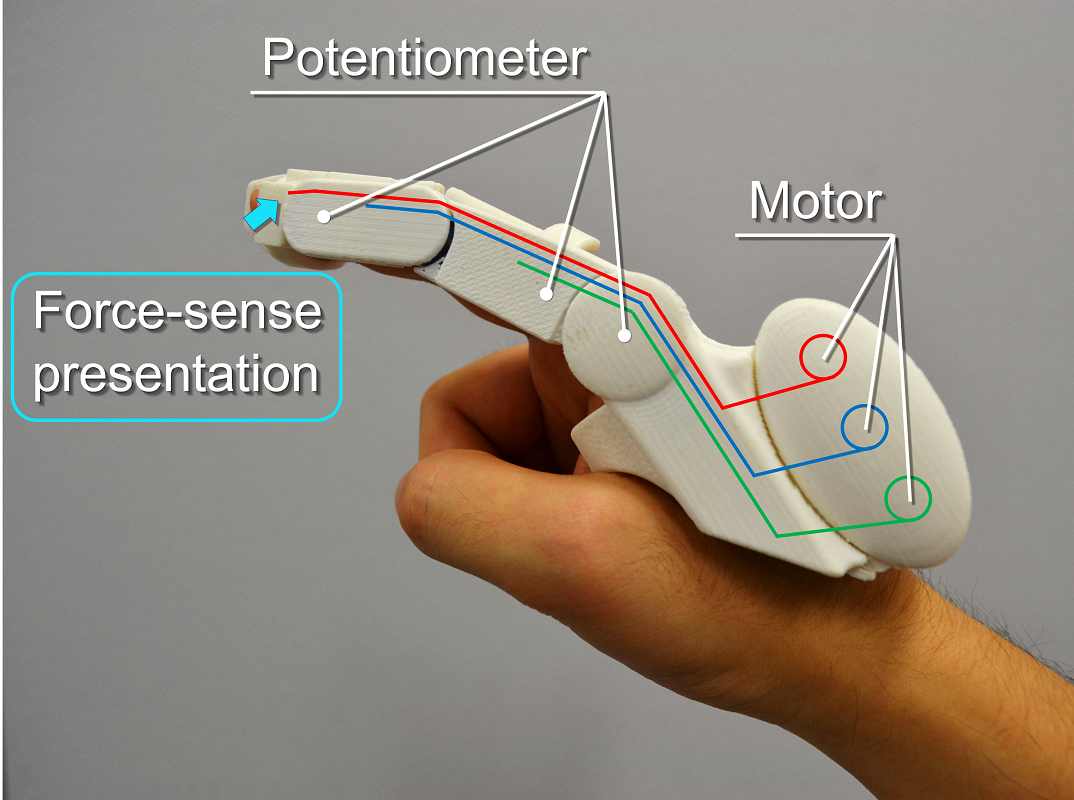
示指インタフェースは,ポテンショメータ,モータ,ワイヤで構成されます.ポテンショメータによって計測された各関節角度を用いて,指先位置の検出を行います.また,ワイヤを巻き取ることで,ロボットの接地,不接地状況を指先に力覚提示します.
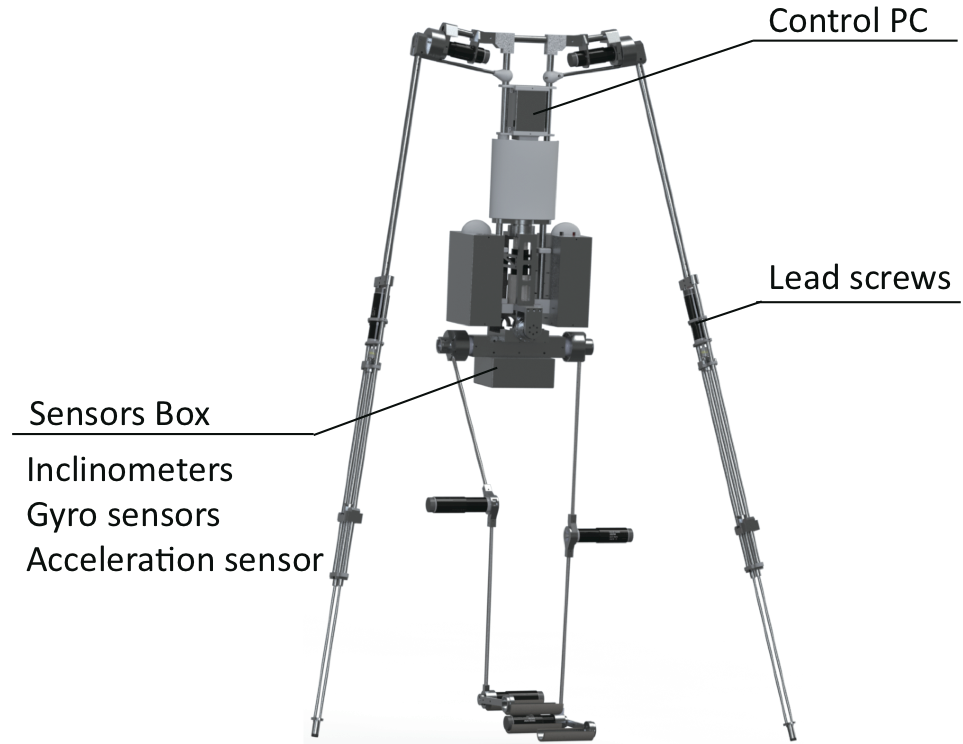
杖歩行を行う患者を想定したロボットを開発しました.ロボットの杖と足は,指の姿勢を用いて制御します.杖と足の動作は右杖→左足→左杖→右足の順に行います.