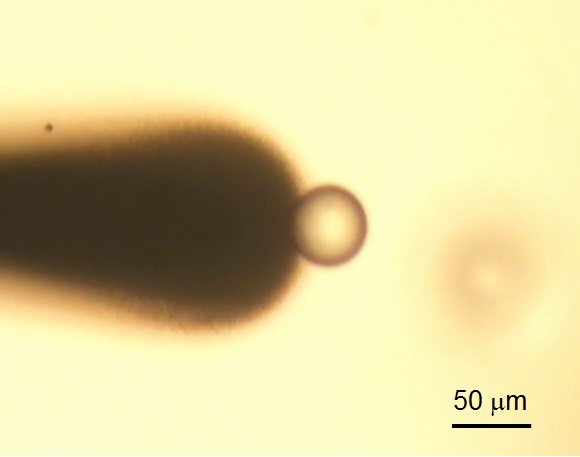
本研究では,生物細胞などの微小な対象物を把持・操作するためのマニピュレーションデバイスに関する研究を行っています.100ミクロン以下の生物細胞などを扱う領域では重力よりも表面力の影響が大きくなるため,対象を直接把持するとデバイスに付着してしまい離れなくなってしまうという問題があります.そこで,本研究では温度によってゾル‐ゲル相変化をする感熱応答性ポリマー溶液を用いたマイクロマニピュレーションデバイスを開発しています.感熱応答性ゲルプローブはマイクロヒータを先端に有し,感熱応答性ゲルをプローブ先端に発生させます.発生させたゲル表面に対象物体を付着させることで把持し,移動後はマイクロヒータの電源を切ってゲルをゾルに戻すことで把持物体を放します.プローブデバイスと把持物体がゲルを介して把持されているため,表面力による把持物体の付着を防ぐことが可能となります.
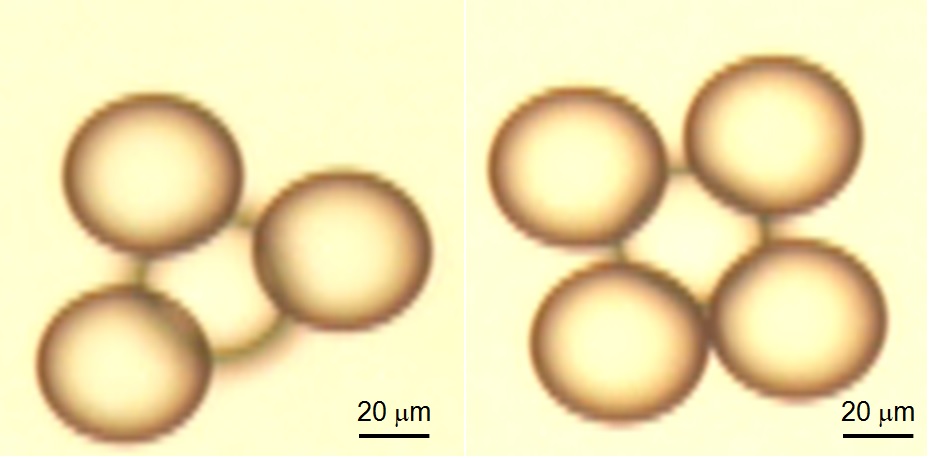
感熱応答性ゲルプローブを用いることで,微小物体を把持・移動させ,任意の位置に精度よく置くことが可能となります.例えば,直径数十ミクロンのマイクロビーズをピラミッドのように3次元的に組み立てることも感熱応答性ゲルプローブを用いれば容易に実現可能です.現在は,細胞の3次元的な組立を行い,再生医療のための細胞の形態変化や機能発現の制御,薬剤の評価等に役立てることを目指しています.