バイオマイクロマニピュレーションシステム
本研究では,生物細胞のような微小な物体を操作するためのマニピュレーションシステムに関して研究を行っています.生物細胞や更に小さいDNAなどは接触プローブ型マニピュレータによって直接操作することは困難であると同時に操作対象を破壊してしまう恐れがあります.そこで,本研究では静電場・磁場・流体場・光場などを制御し,非接触と接触操作を併用した,非破壊・低侵襲なバイオマイクロマニピュレーションシステムの構築を目指しています.また,マイクロ・ナノピペットなどを用いたマイクロマニピュレーション技術とマイクロチップ技術を併用することにより,単一の微小な細胞を自在に操り,効率的かつ高度な操作・計測技術への応用を目指しています.近年では,3次元細胞システムを構築するための細胞操作・細胞配列・細胞固定・細胞組立て技術などについて,研究を進めています.
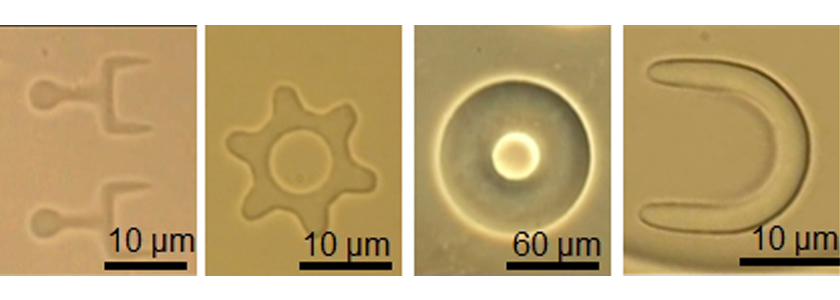
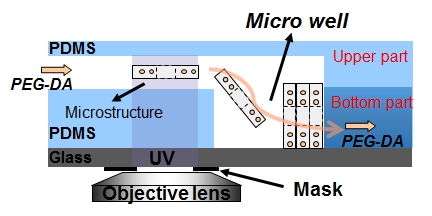
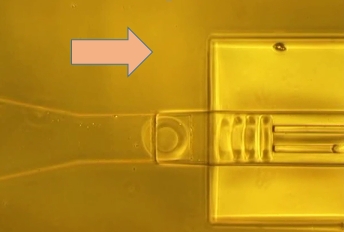
マイクロ流体チップ内で,光硬化性樹脂を用いて,任意のマイクロ構造体を作製することができます.細胞を懸濁させた溶液中で作成すると,細胞包埋型マイクロ構造体が得られます.これらの構造体を連続的に作成し,自己組織化現象を利用することで,3次元的に組み立てるための研究を行っています.
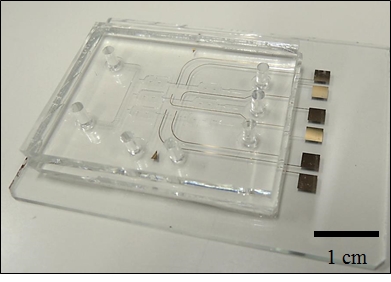
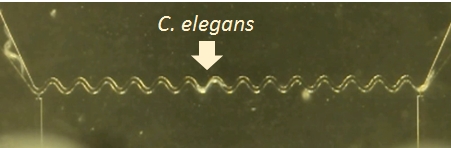
微小なモデル生物として研究に用いられている線虫は,走性(外部刺激(化学,電気,温度など様々) に対する行動)を有しています.マイクロ流体チップ内で,この走性を利用するこで,線虫の運動制御を直接的に制御することが可能です.
- Jaehoon Jung
- Masahiro Nakajima
- Masaru Takeuchi
- Qiang Huang
- Toshio Fukuda
- Microfluidic device for Coincident Multi-exposure test on C. elegans
- 2013 International Symposium on Micro-Nano Mechatronics and Human Science (MHS2013)
- 60-63
- Nagoya, Japan
- Nov. 10-13, 2013
- Tao Yue
- Masahiro Nakajima
- Huaping Wang
- Chengzhi Hu
- Masaru Takeuchi
- Toshio Fukuda
- Fabrication and Assembly of Multi-layered Microstructures embedding Cells inside Microfluidic Devices
- 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- 514-519
- 3-7 Nov. 2013
- Tokyo, Japan
- Tao Yue
- Masahiro Nakajima
- Masaru Kojima
- Toshio Fukuda
- High speed laser manipulation of on-chip fabricated microstructures by replacing solution inside microfluidic channel
- 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- pp.433-438
- 25-30 Sept. 2011
- San Francisco, USA