人間は日常で行う作業に応じて把持力を変化させていますが,人間の指は把持力の変化にともない指先の剛性も変化するという特性を持っています.この指先剛性を巧みに変化させることで把持した物体の位置のズレを許容し,物体に対する外乱を吸収しています.そこで,人間の指先剛性を模擬したデバイスを製作し,指先剛性が物体把持動作に与える影響を定量的に検証を行いました.指先剛性を人間のように変化させることで物体把持動作をより早く行うことができることを示しました.
人間の指は把持力が大きくなるにつれて関節剛性が高まるという特性を持っています.把持力が大きくなると剛性も大きくなり,よりしっかりと物体を把持することができます.把持力が小さくなると剛性も小さくなり,把持物体の姿勢を容易に変化させることができます.状況に応じて把持力を変化させることで剛性を調整し,より複雑な作業をすばやく行うことができます.
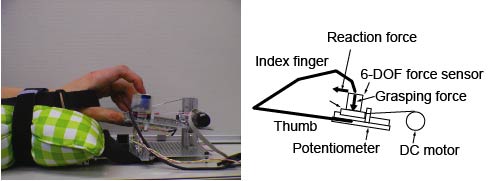
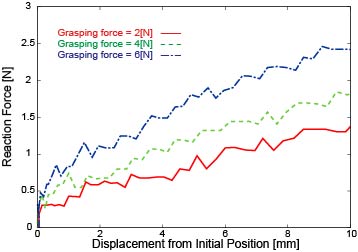
剛性の影響を検証する為に人間の指先剛性と同じように把持力に応じて剛性が増加する特性を持ったハンドを製作しました.このハンドと把持力にかかわらず一定の剛性となるハンドをタスクの実行時間の点から比較しました.実験の結果,剛性が可変であることでタスクの実行時間が減少するという結果が得られています.


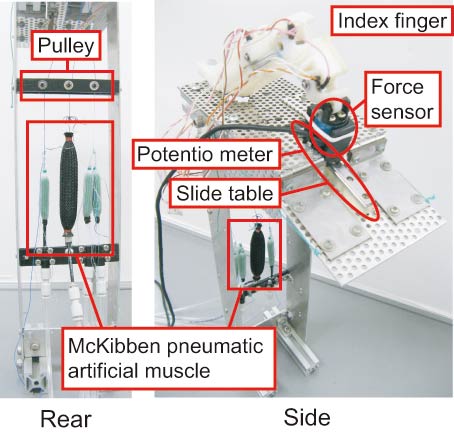
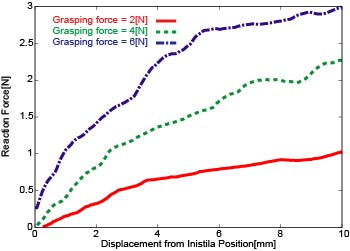
人間のように把持力に応じて指先剛性が増加する特性を支援機器に実現する為に多関節腱駆動という駆動方式を提案しました.指先の構造をモデル化することでシミュレーションによって最適な腱配置を決定し,実機モデルを製作しました.計測結果から多関節腱駆動を用いて指先可変剛性を実現できることを確認しました.