



近年,日本を含む世界各国では少子高齢化が進んでおり社会問題となっていますが,その1つとして高齢者の介護労働力の不足が挙げられます.高齢者の人数に対して若者の人数が少ないため,介護現場において十分な介護サービスを提供できなくなってきているためです.そこで,介護労働力を補うために介護ロボットが近年注目されてきており,介護を代行・支援することができる介護ロボットの重要性は今後ますます高まっていくと推察されます.特に,高齢者の介護において歩行補助や歩行能力の改善を目指したリハビリテーションは重要な分野です.歩行という行為は高齢者の生活の質(Quality of Life)の維持・向上につながるものであり,高齢化社会を豊かなものにするために不可欠です.加えて,高齢者が歩行等の運動をせずに寝たきりの状態が続くと廃用症候群などに陥り,身体機能が低下していく恐れがあります.以上の理由から,我々は高齢者や障がい者の歩行補助を目的とした杖型の全方位ロボット"intelligent cane"の研究・開発を行っています.
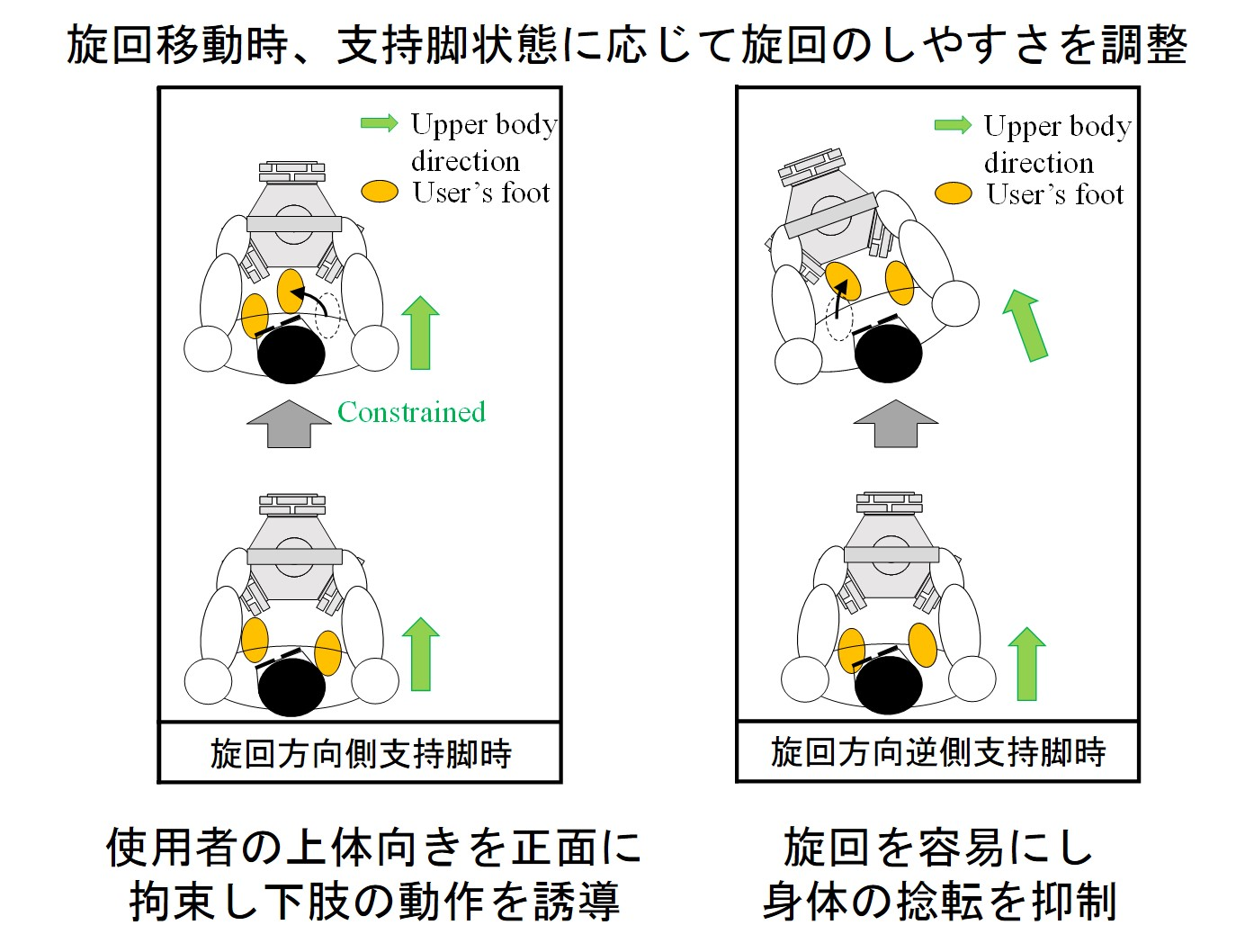
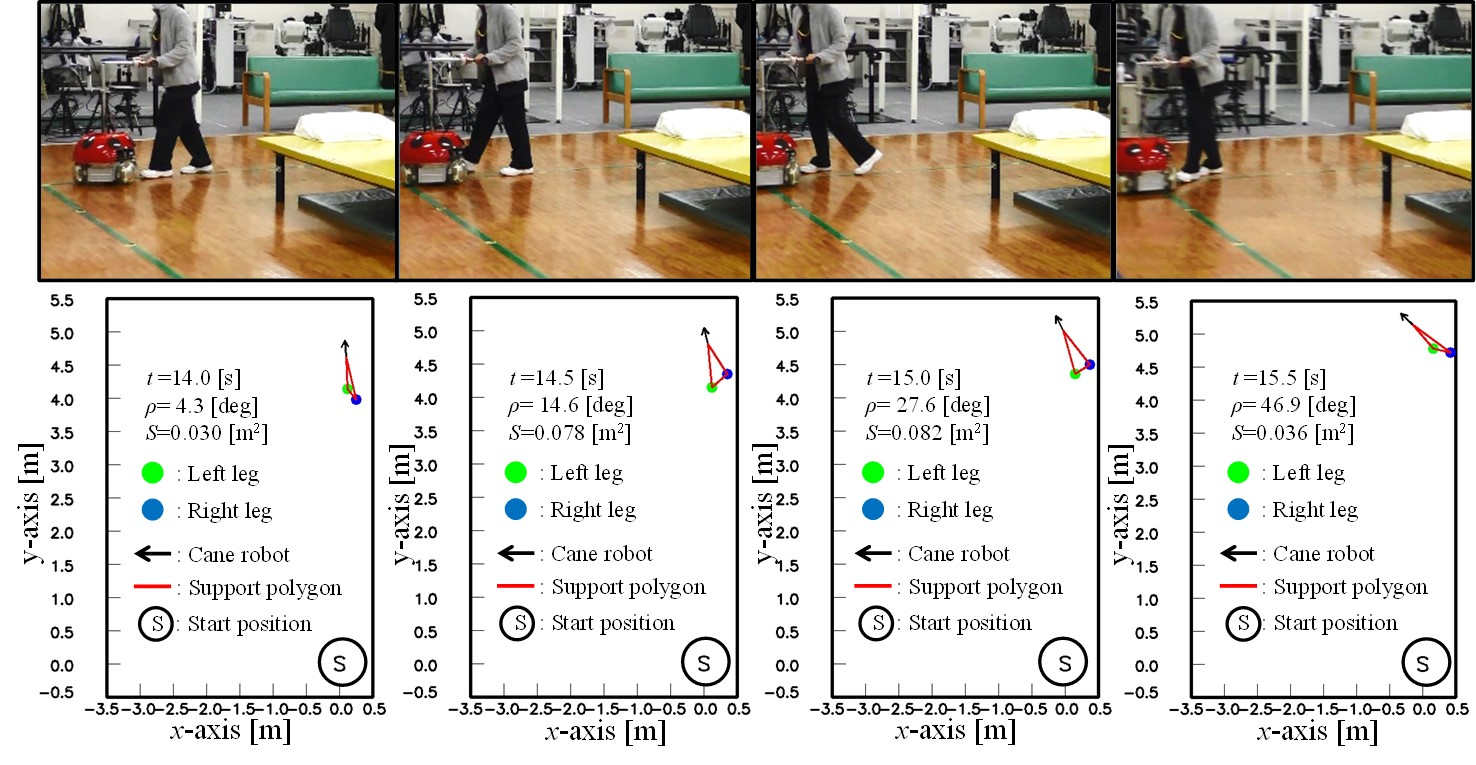
使用者の転倒防止においては,躓きなどの転倒のきっかけを検出した後に転倒を防止しようとするよりも予め転倒の危険の高い状態を回避するほうが効果的です.使用者がタンデムスタンス(使用者の足が一列に並ぶ状態)に陥ってしまうと,使用者とロボットによって形作られる支持多角形は横方向に縮小し,転倒の危険性が高まります.そこで,使用者の支持脚状態に応じてロボットのアドミッタンスパラメーターを変更し動作を調整することにより,旋回中の使用者がタンデムスタンスに陥ることを予防することを提案しました.使用者が旋回する際には,下肢の動きは上半身の向きに誘導され,上半身の向きはケインロボットに拘束されます.タンデムスタンスは旋回方向側の脚が支持脚となっている際に発生しやすいため,同期間においてロボットを正面の位置に留まらせることによってタンデムスタンスに陥らないように下肢の動きを誘導することが出来ます.一方で,旋回方向逆側の脚が支持脚となっている際には,ロボットを旋回方向に容易に移動させます.提案した手法を用いて,リハビリテーション現場のスタッフの方々(8名)に協力いただき,歩行実験を行ったところ,実験により旋回時において使用者の支持多角形の面積は有意に(p<0.05)増加していることが確認され,提案手法による転倒リスクの低下を確認しました.
国立研究法人 国立長寿医療研究センターに入院中の高齢者の方々に実際にケインロボットを用いて歩行実験を行い,ハビリテーションにおいてロボットを導入することで,運動効率(体力増進効果)にどのような影響を与えることが出来るのか等の検証を進めています.高齢者の方々の反応として,ロボットに興味を持つことでリハビリテーションへの取り組み意欲の向上が見られています.将来,高齢者の方々がケインロボットを用いることで,自分ひとりで安全に歩行訓練を行えるようになり,入院期間短縮の実現を目指しています.