概要
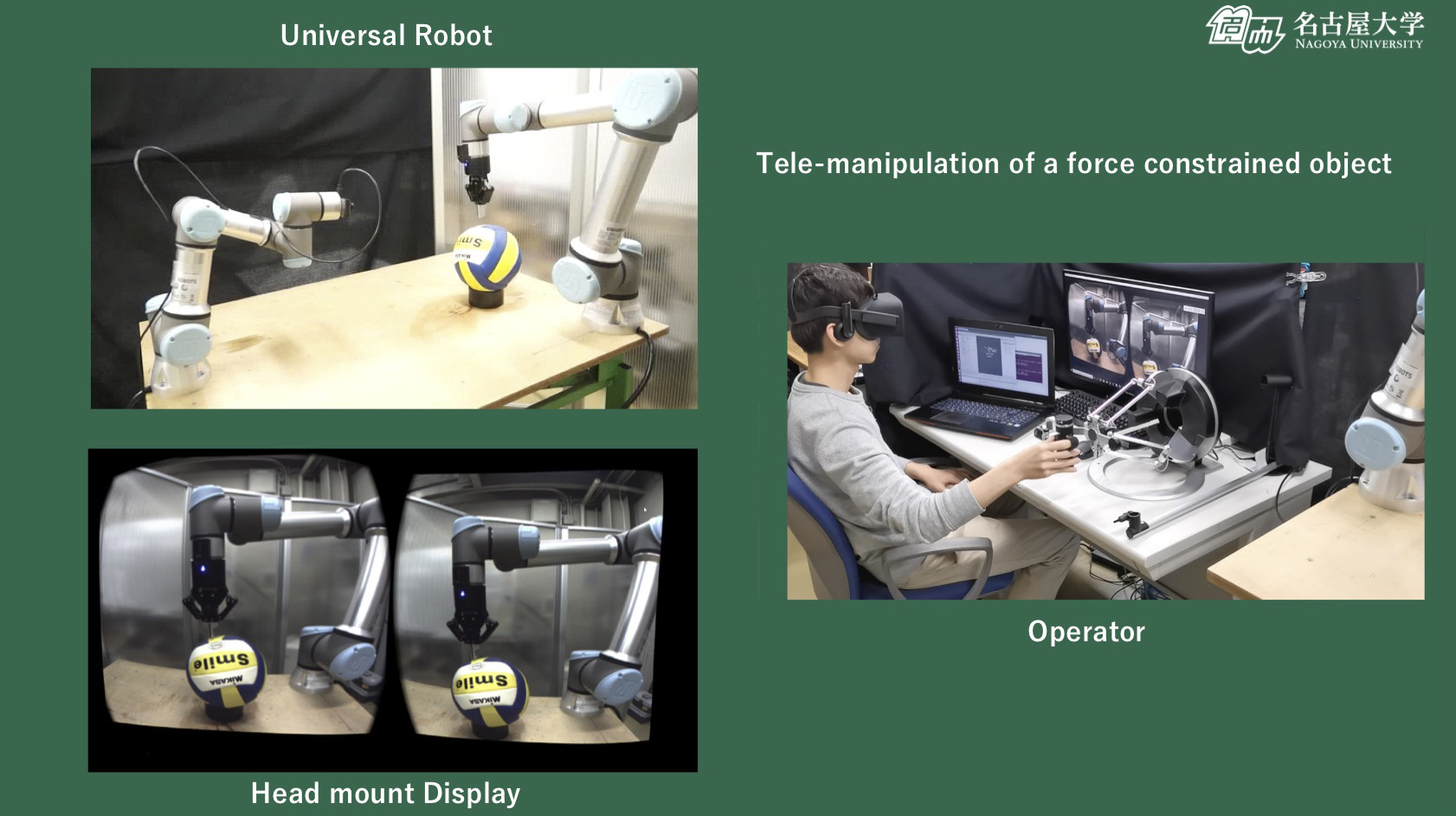
本研究では、擬似的に力覚をフィードバックするなどにより、直感的なテレオペレーションを行うインタフェースの研究を行っております。
業績
- Yaonan Zhu, Tadayoshi Aoyama, Yasuhisa Hasegawa, "Enhancing the Transparency by Onomatopoeia for Passivity-Based Time-Delayed Teleoperation", IEEE Robotics and Automation Letters, 2020.