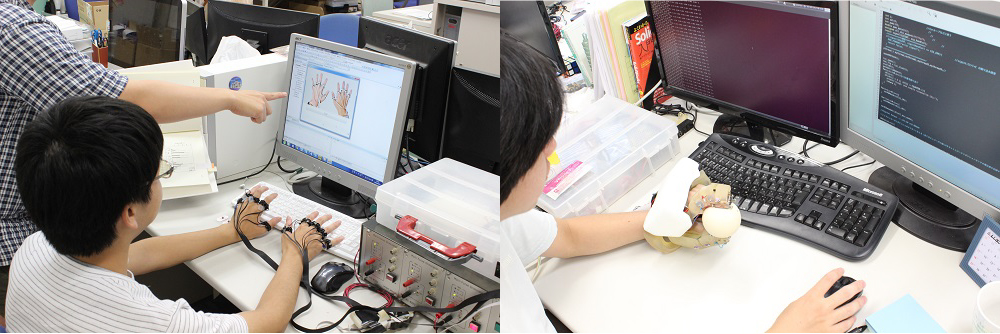
人の機能の補完・協調・拡張に必要となるインタフェース技術および親和性向上技術の基礎研究を行い、その成果を身体機能支援へ応用しています。身体の機能支援として、直接的な動作・作業支援と、学習・リハビリ支援に取り組んでいます。