リハビリテーションにおいて近年、治療法の一つとして機械の力によって外部から体を強制的に動かすことが行われています。このような治療法は一定の効果があるとされていますが、そのメカニズムや効果的な適用方法についてはまだ分かっていないことがあります。そこで本研究では人間よりも実験条件を揃えやすいラットを用いて、メカニズムの解明やより効果的な動作支援方法を開発することを目的として、産業技術総合研究所の金子秀和先生と共同で研究を行っています。
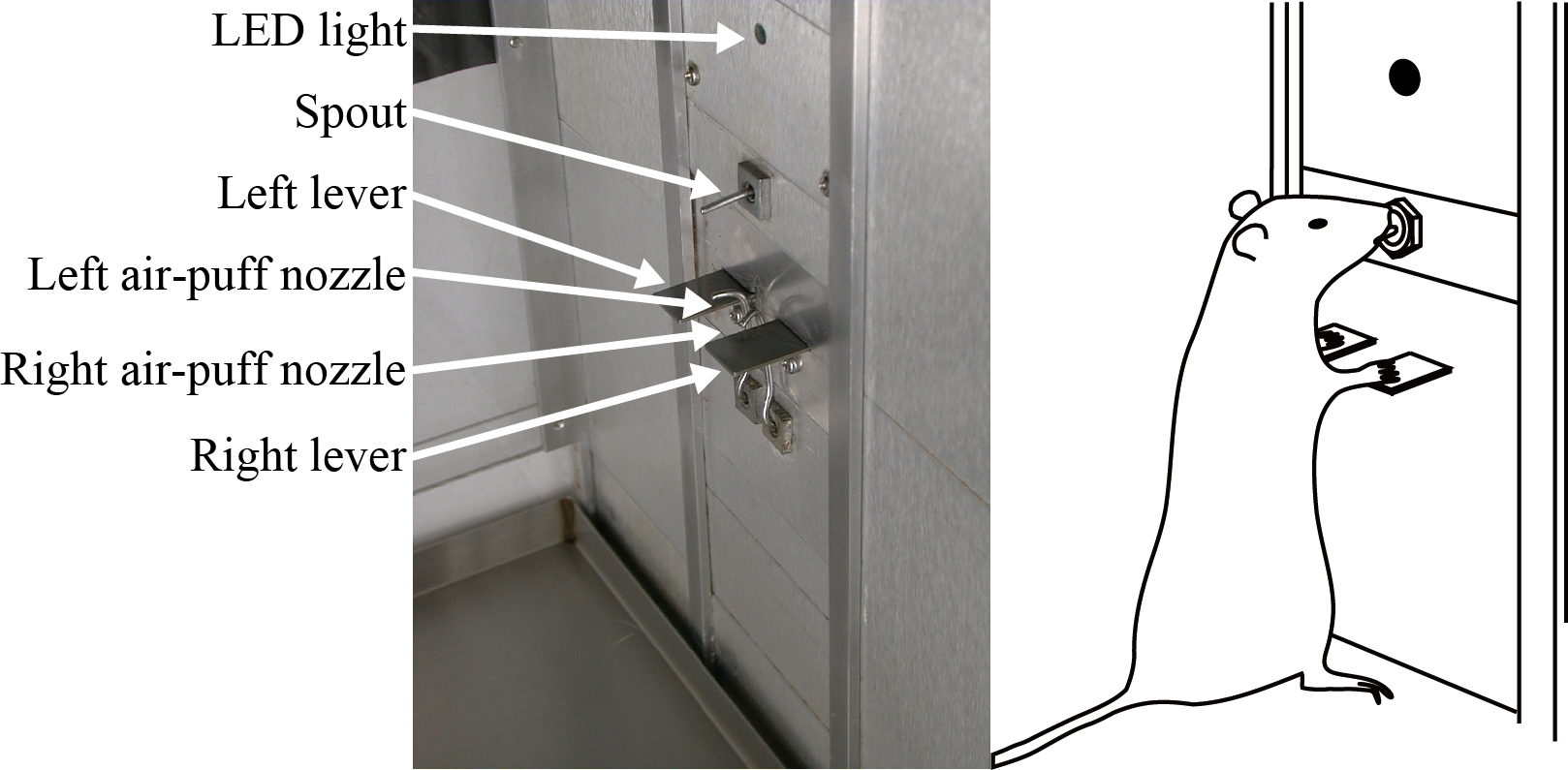
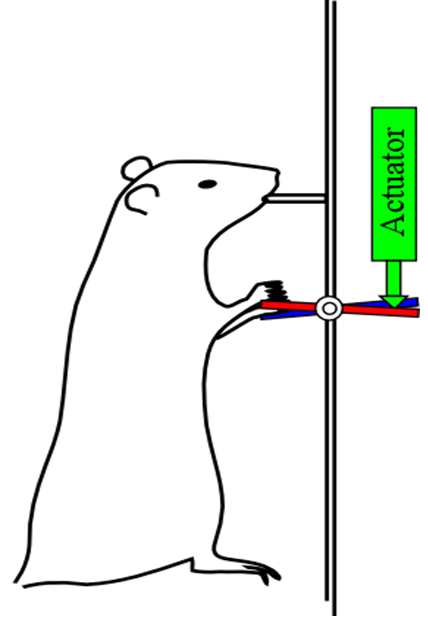
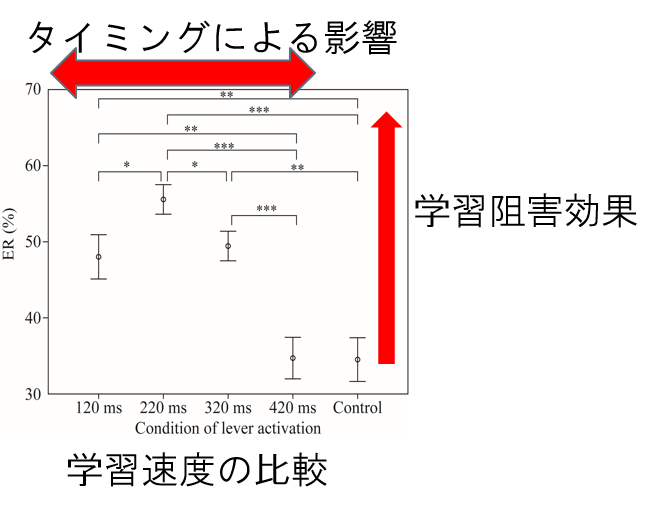
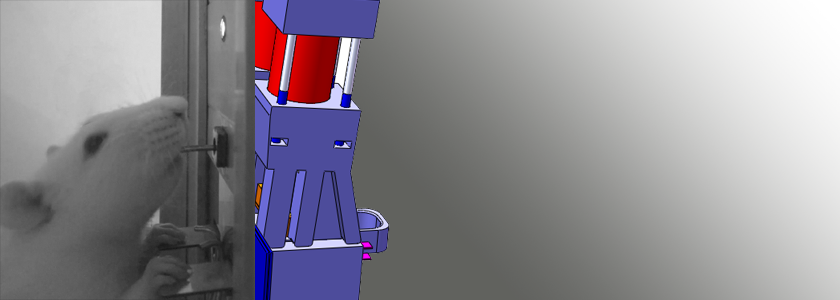
ラットに選択応答時間タスクを行わせ、それに合わせて応答用のレバーをアクチュエータによって機械的に動作させることで動作支援を行います。その際、動作支援のタイミングなどの条件を様々に変化させることでより効果的に動作支援を行える条件を調べます。現在までに、動作支援のタイミングや支援の与え方によって学習速度が変化することが分かっています。