現在,脳卒中などを原因とする下肢麻痺患者の歩行リハビリテーションに装着型ロボットを用いたロボットセラピーが行われる様になっています.リハビリテーションを行い脳の歩行を指令する機能が再建されることにより歩行機能が回復します.それではロボットセラピーにおいてどの様な動作を患者に与えれば脳の機能再建が促進されるのでしょうか?本研究では歩行を模擬する動作を提示している際の脳活動をfMRI(機能的脳磁気共鳴画像)により計測し,脳機能再建が促進される動作提示手法を明らかにすることを目的とします.本研究で開発した下肢動作提示システムLoMSは,装着者に歩行模擬動作を提示している際の脳活動をfMRIにより計測することを可能にします.
fMRIによる脳活動計測には高い磁場と高周波数の電磁波が伴います.したがって,鉄などの磁性の高い金属を用いるとシステムがMRI本体に吸引されたり,MRIの磁場を乱したり,更にはシステム自体の機能が上手く動作しないという問題が発生します.そこでfMRI検査中に用いるシステムには以下の条件を満たすことが求められます.
条件1.システムの存在がMRIの磁場を乱さない.
条件2.システムの動作がMRIの撮像動作に影響を与えない.
条件3.システムの機能がMRIの撮像動作に影響を受けない.
これらの条件を満たすことをMRI適合性を有すると定義し,LoMSの開発を行いました.
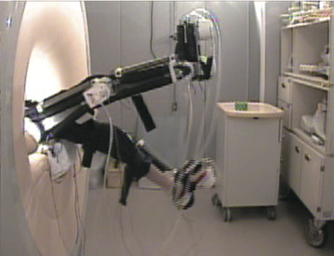
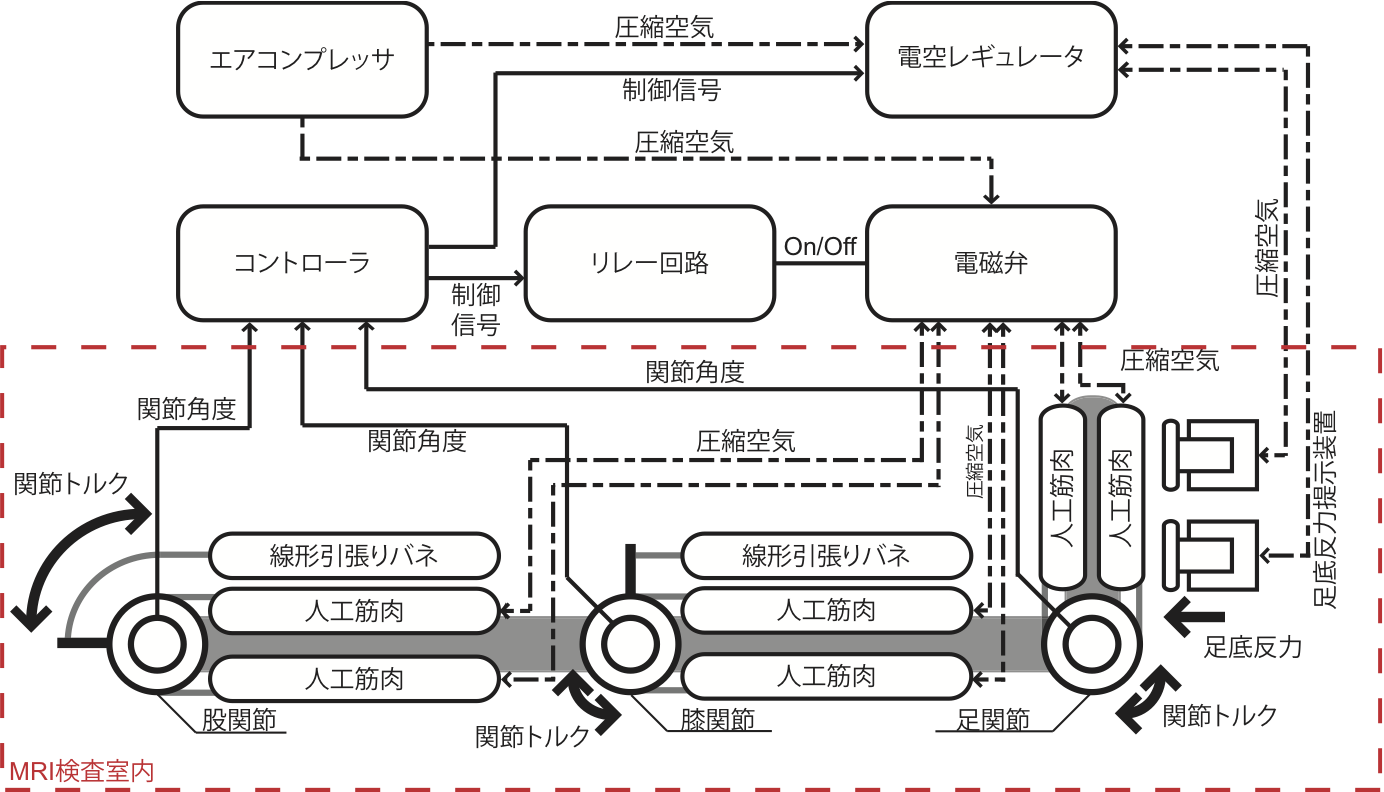
LoMSは片脚3自由度の角度軌道・トルク提示及び,足底へ歩行時の床反力を提示可能です.また,fMRIによる撮像では被験者が仰向け姿勢である為,LoMSは仰向け姿勢で歩行模擬動作を提示します. LoMSはMRI適合性を満たす為にステンレスやABS樹脂などで構成しています.また,一般的磁気式モータはMRI適合性を満たさない為,LoMSの関節駆動にはマッキベン型空気圧式人工筋肉を用いています.足底への反力提示にも同様に空気圧を用いた駆動機構を用いています.また,LoMSを制御するマイコンや人工筋肉に圧縮空気を供給するエアコンプレッサ等の強磁性体を含む構成部品はfMRI検査室外に配置出来る様に設計しています.
開発したLoMSがMRI適合性を満たす事を確かめる為に以下の3つの試験を行いました.
・磁化率アーチファクト試験(条件1)
・機能的画像撮像試験(条件2)
・動作計測試験(条件3)
これら3つのMRI適合性試験の結果,LoMSがMRI適合性を有する事を確認しました.
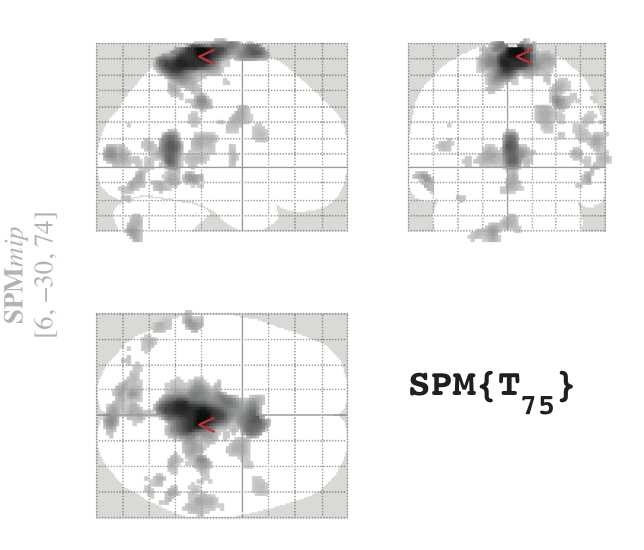
ここまで,MRI適合性を有する様にLoMSを開発し,MRI適合性試験によりLoMSがMRI適合性を有する事を確認し説明しました.最後に,LoMSが歩行模擬動作を提示している際の脳活動がfMRIによって計測可能であることを確認しました.歩行時には脳の頭頂部(中心溝)付近の運動野及び感覚野の活動が活発化します.本計測では歩行時の活動領域と同様の場所で脳活動が計測されました.