
University of Tsukuba Kinesiology Laboratory Yasuhisa Hasegawa 日本語







We are engaged in research and development of applied and basic technology to support comfortable body movement of healthy and physically challenged people.
 |
Gripping support systemSystem can support from 0 kg to 50 kg in proportion to the gripping force of a healthy person。 |
 |
Exoesqueletal Meal Assistence System (EMAS)Support for the proper use of upper extremities for meal in patients with muscular dystrophy |
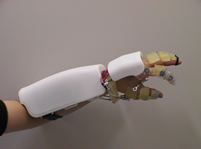 |
Forearm support systemSupport the voluntary movement of elbow, wrist and 5 fingers in healthy people |
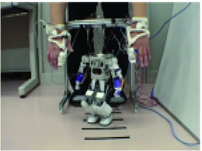 |
Walking control systemThe movement of wrist and fingers control the movement of a bipedal robot |
 |
Tongue movement based interfaceMeasure electrical activity from the tongue in the neck to control an interface |
 |
Bipedal walking in underactuated mechanismThe objective is to obtain bipedal walking in an underactuated mechanism |
 |
Motion control in a multi-locomotion robotStudy on brachiation, two foot and four foot walking robot, and its connecting transitions |
Cutting-edge research and development support program

Global COE Program

Science emphasis in campus area
