About
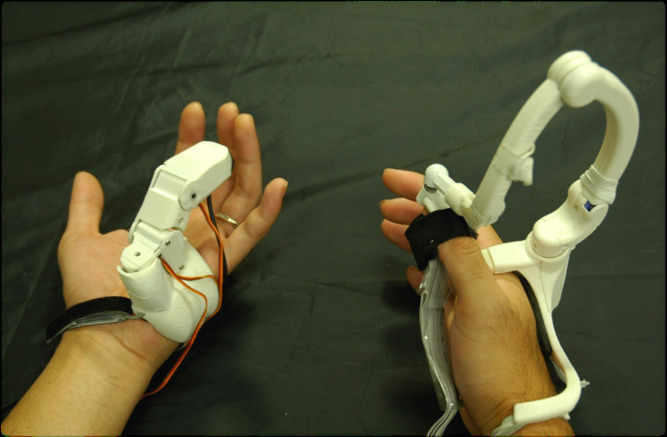
Recently, application of robotics to prostheses has been studied. To improve operability of prostheses, an embodiment of prostheses is important. The purpose of this research is embodiment of extra robotic thumb. We have developed a robotic thumb and a manipulation interface. The artificial thumb is almost same size as a human thumb and is attached on a palm of the left hand. We operate the artificial thumb by an interface equipped with right hand. We performed some experiments to evaluate effect of sensory feedback and found that sensory feedback improves an operability and emobodiment of the prostheses.
Publications
- Development of sense of self-location based on somatosensory feedback from finger tips for extra robotic thumb control, Yaonan Zhu, Takayuki Ito, Tadayoshi Aoyama and Yasuhisa Hasegawa, ROBOMECH Journal, 6.7, 2019
- Modification of body schema by use of extra robotic thumb, Noel Segura Meraz, Masafumi Sobajima, Tadayoshi Aoyama and Yasuhisa Hasegawa, ROBOMECH Journal, 5.3, 2018
- H.Shikida,Y.Hasegawa: "Hand Space Change after Use of Extra Robotic Thumb Using Tactile Feedback by Electrical Stimulation," International Symposium on Micro-Nano Mechatronics and Human Science, TP2-1-3, 2016
- M.Sobajima,Y.Sato,W.Xufeng,Y.Hasegawa: "Improvement of Operability of Extra Robotic Thumb Using Tactile Feedback by Electrical Stimulation," International Symposium on Micro-Nano Mechatronics and Human Science, TP2-1-3, 2015