Human Support
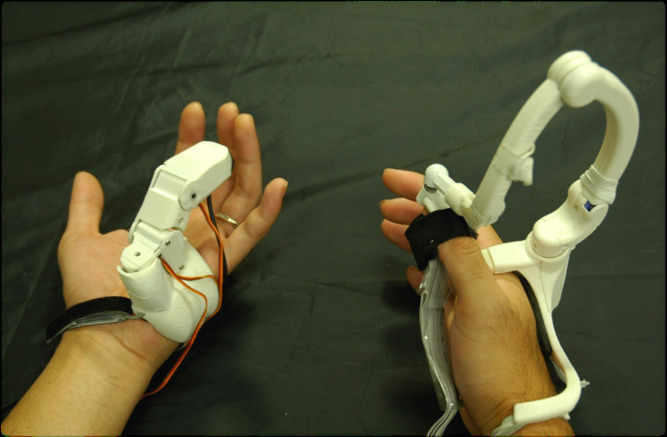
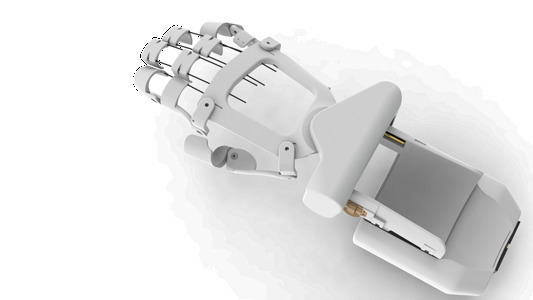
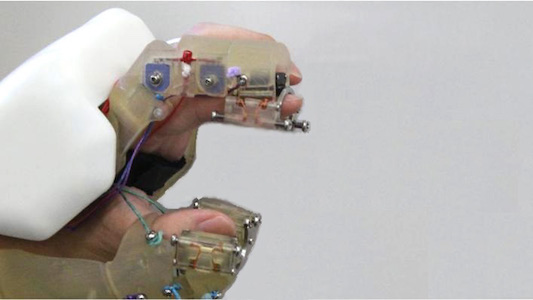
Extra Robotic Finger
Robotic finger on a palm extends human ability.

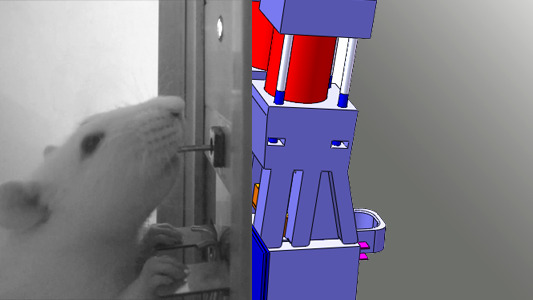
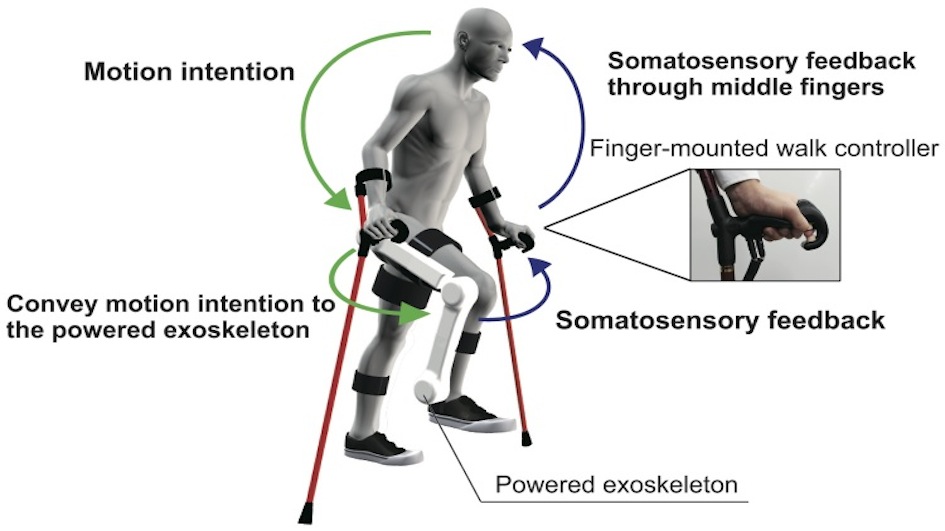
Intelligent Cane
Robotic cane leads sutable waling for a user

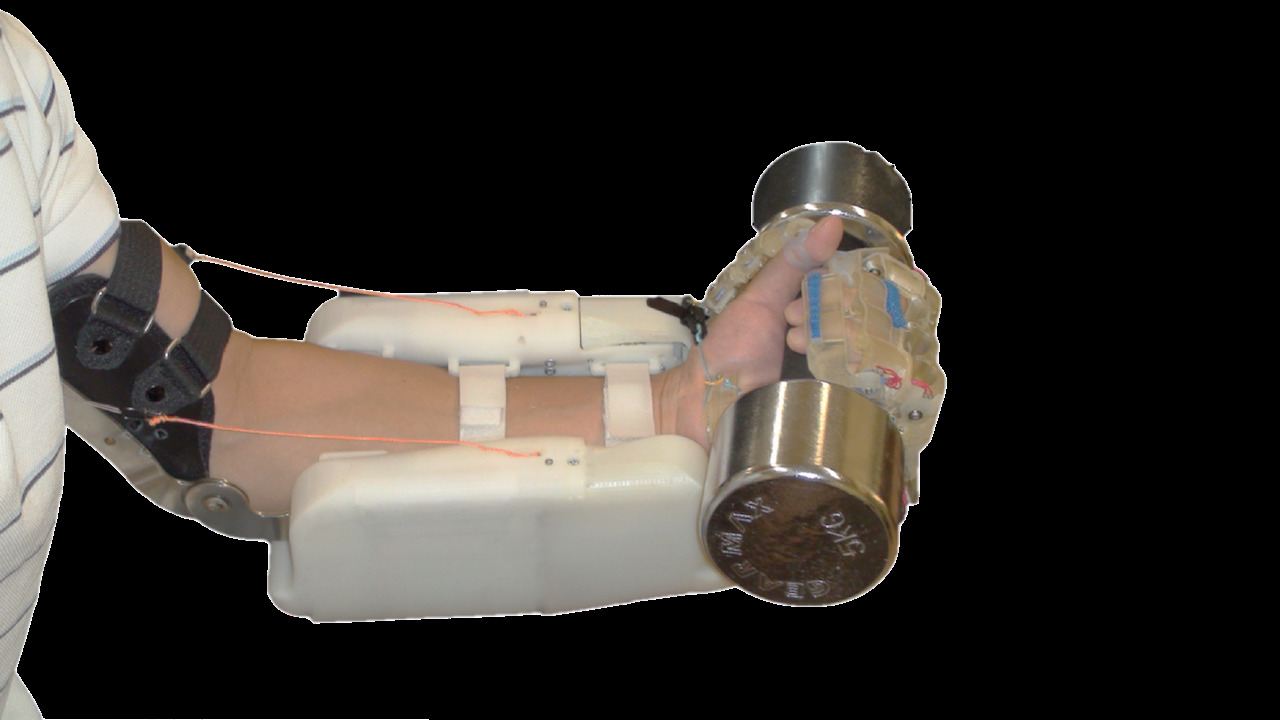
Running Augmentation and Assistance
Exoskeleton reduces a metabolic cost of a runner.