About
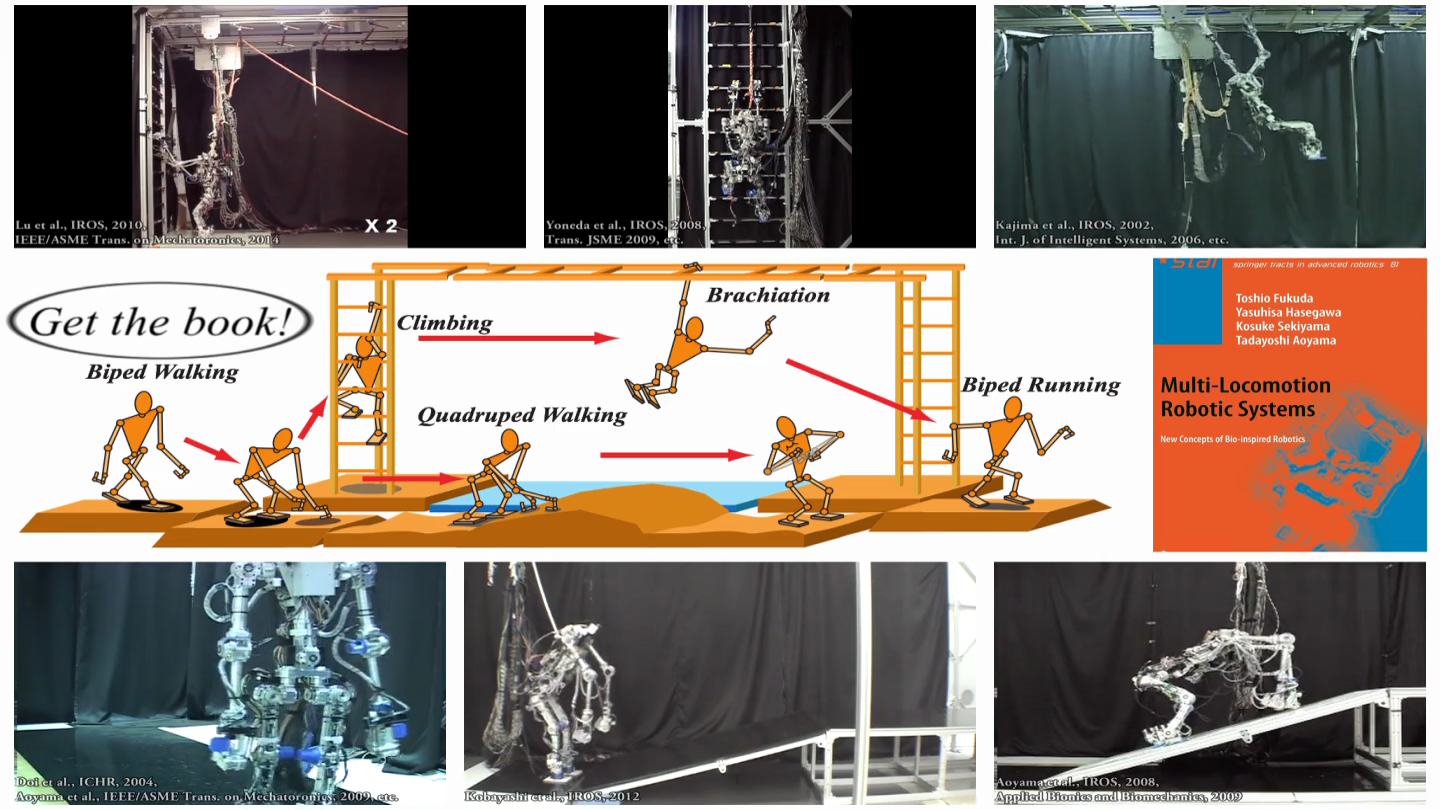
This Multi-Locomotion Robot introduces locomotion robots which have unique types of locomotion such as brachiation, ladder climbing, biped walk, quadruped walk, transferring motion, and so on. These types of locomotion enhance the versatility of robots working in an actual environment. Robot's locomotion is one of design problem based on kinematics, and dynamics to improve stability, energy consumption, velocity, maneuverability and so on. We solve problems related to the locomotion: each locomotion design; transition motion desing to connect different types of locomotion; autonomous selection of the optimal locomotion for recognized situation; and unification of multiple gaits to enhance their performance.
Publications
- Multi-locomotion robotic systems: new concepts of bio-inspired robotics, T Fukuda, Y Hasegawa, K Sekiyama, T Aoyama, Springer, 2012.
- Cane-supported walking by humanoid robot and falling-factor-based optimal cane usage selection, T. Kobayashi, K. Sekiyama, T. Aoyama, and T. Fukuda, Robotics and Autonomous Systems, Vol. 68, pp. 21–35, 2015
- Selection algorithm for locomotion based on the evaluation of falling risk, T. Kobayashi, T. Aoyama, K. Sekiyama, and T. Fukuda, IEEE Transactions on Robotics, Vol. 31, No. 3, pp. 750–765, 2015
- Selection of two arm-swing strategies for bipedal walking to enhance both stability and efficiency, T. Kobayashi, K. Sekiyama, T. Aoyama, Y. Hasegawa, and T. Fukuda, Advanced Robotics, 2016 (online first)
- Adaptive speed controller using swing-leg motion for 3-D limit-cycle-based bipedal gait, T. Kobayashi, T. Aoyama, Y. Hasegawa, K. Sekiyama, and T. Fukuda, Nonlinear Dynamics, 2016 (online first)
- Unified bipedal gait for walking and running by dynamics-based virtual holonomic constraint in PDAC, T. Kobayashi, Y. Hasegawa, K. Sekiyama, T. Aoyama, and T. Fukuda, IEEE International Conference on Robotics and Automation (ICRA),pp. 1769-1775, 2016