概要
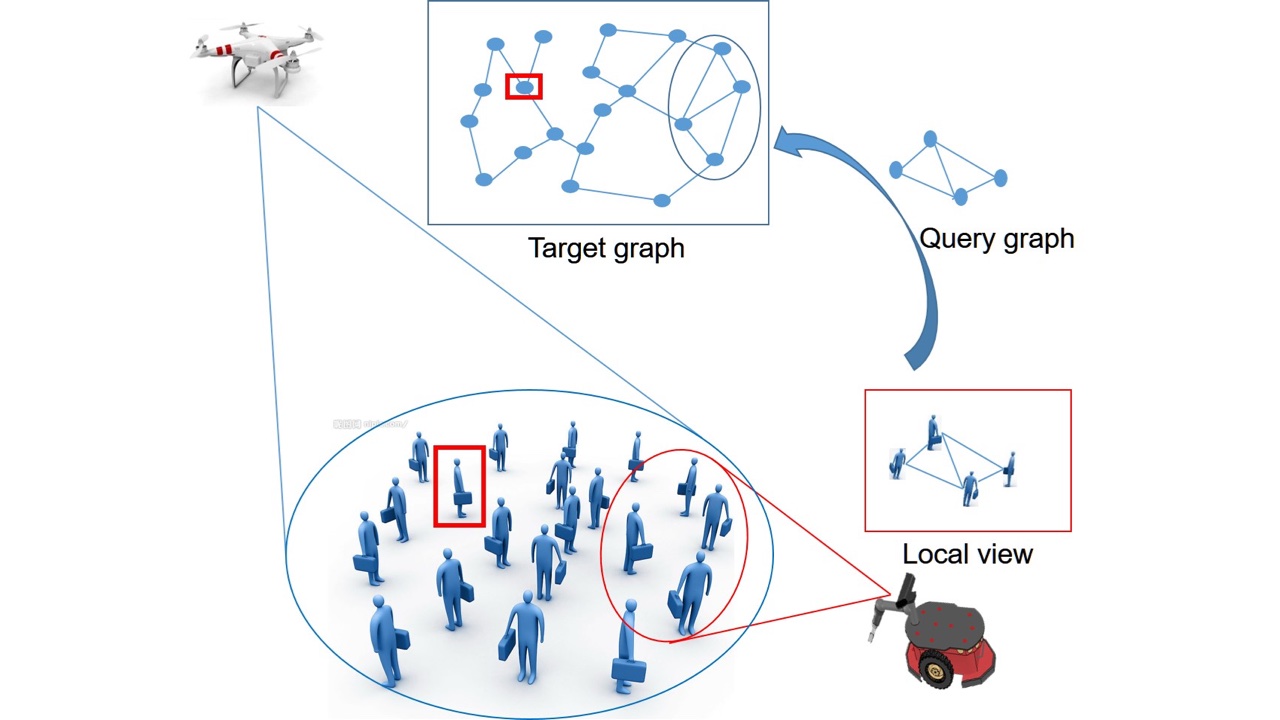
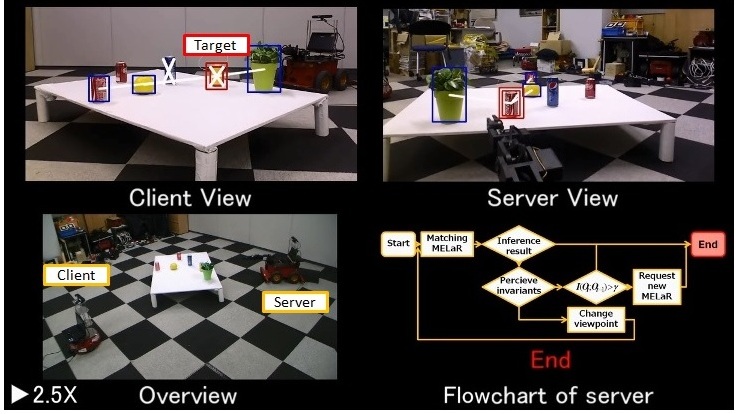
複数のロボットが協調作業を遂行するためには,作業対象をロボット間で同定すること,つまり物体の共有認知が必要になります.物体を共有するには色や形など物体の特徴を共有できることが前提となります.しかしながら物体の見た目は視点によって異なるため,共有可能な特徴の判断は困難です.この問題に対し階層的に異なる物体の特徴を適応的に取捨選択し,特徴間の関係をグラフ的にとらえる手法の研究をしています.
業績
- S.Tomita, and K.Sekiyama: "Cognitive sharing of object with subgraph matching and entropy minimization in multi robot systems", Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference, pp. 2511-2516, 2015.
- S. Tomita, K. Sekiyama and T. Fukuda: "Consensus-Making Algorithms for Cognitive Sharing of Object in Multi-Robot Systems", ROBOMECH Journal, , vol. 1, No. 1, 2014
- S. Tomita, K. Sekiyama and T. Fukuda "Consensus Making Algorithms Based on Invariants Perception for Cognitive Sharing in Multi-Robot", Proc. of Second International Conference on Robot, Vision and Signal Processing(RVSP 2013), VSP-2013-104, 2013.