Japanese
Japanese人支援ロボティクス
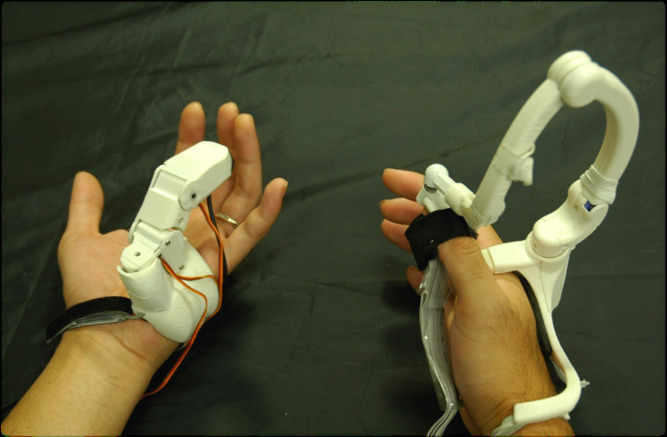
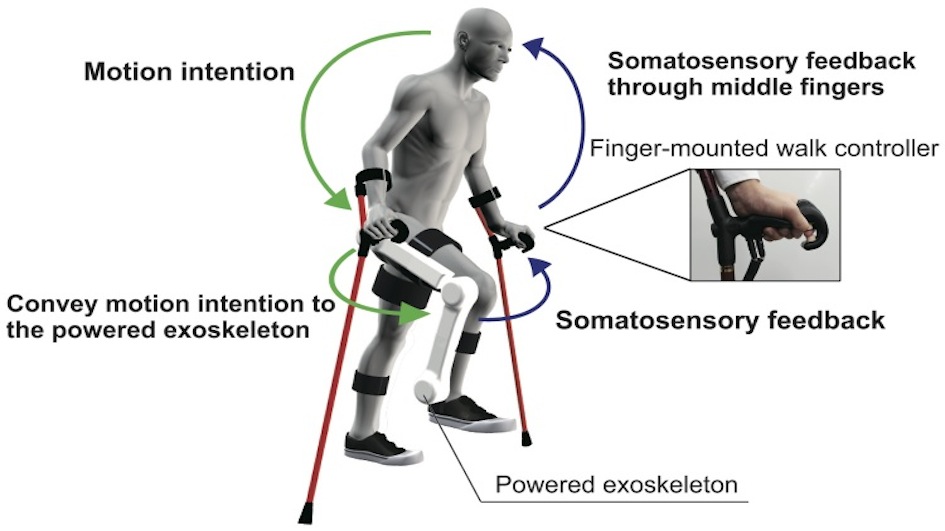
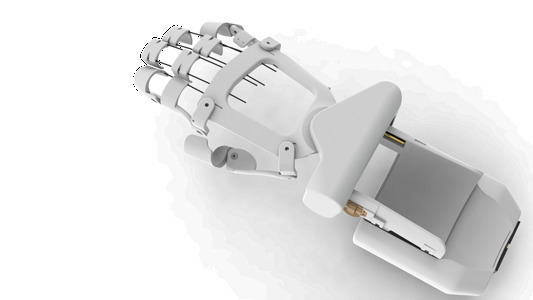
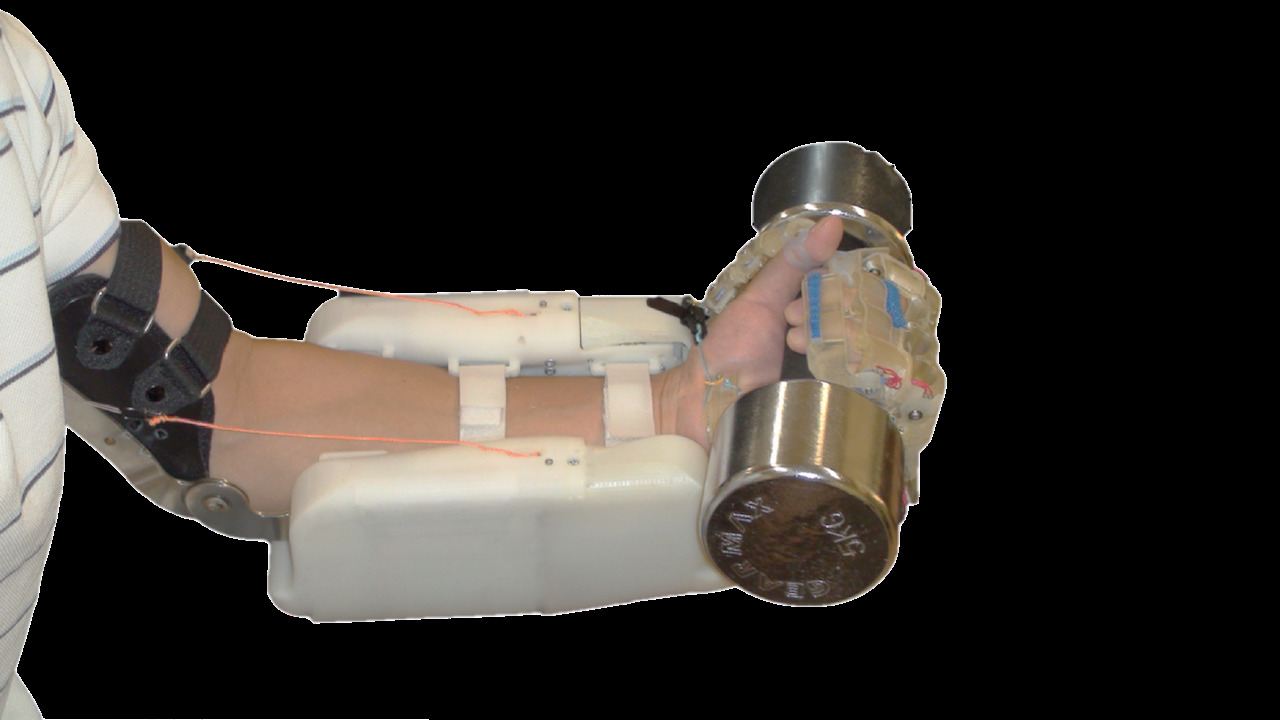
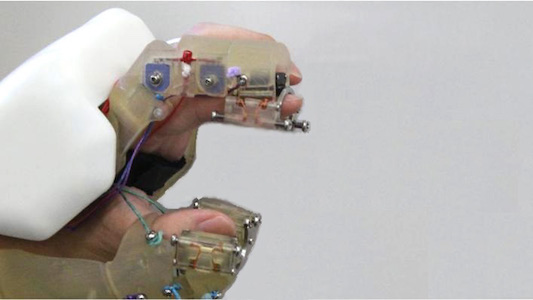
人間活動の豊かさを高めるため、作業や運動を支援するロボットの研究を進めております。扱いやすいロボットを目指し、人とロボットの親和性やロボット身体化を促進するユーザインタフェース技術、身体装着技術、運動計測技術、シェアードコントロールなどハードウエア開発と知能化に取り組み、次世代の生活支援ロボットを創造しております。





Past Projects






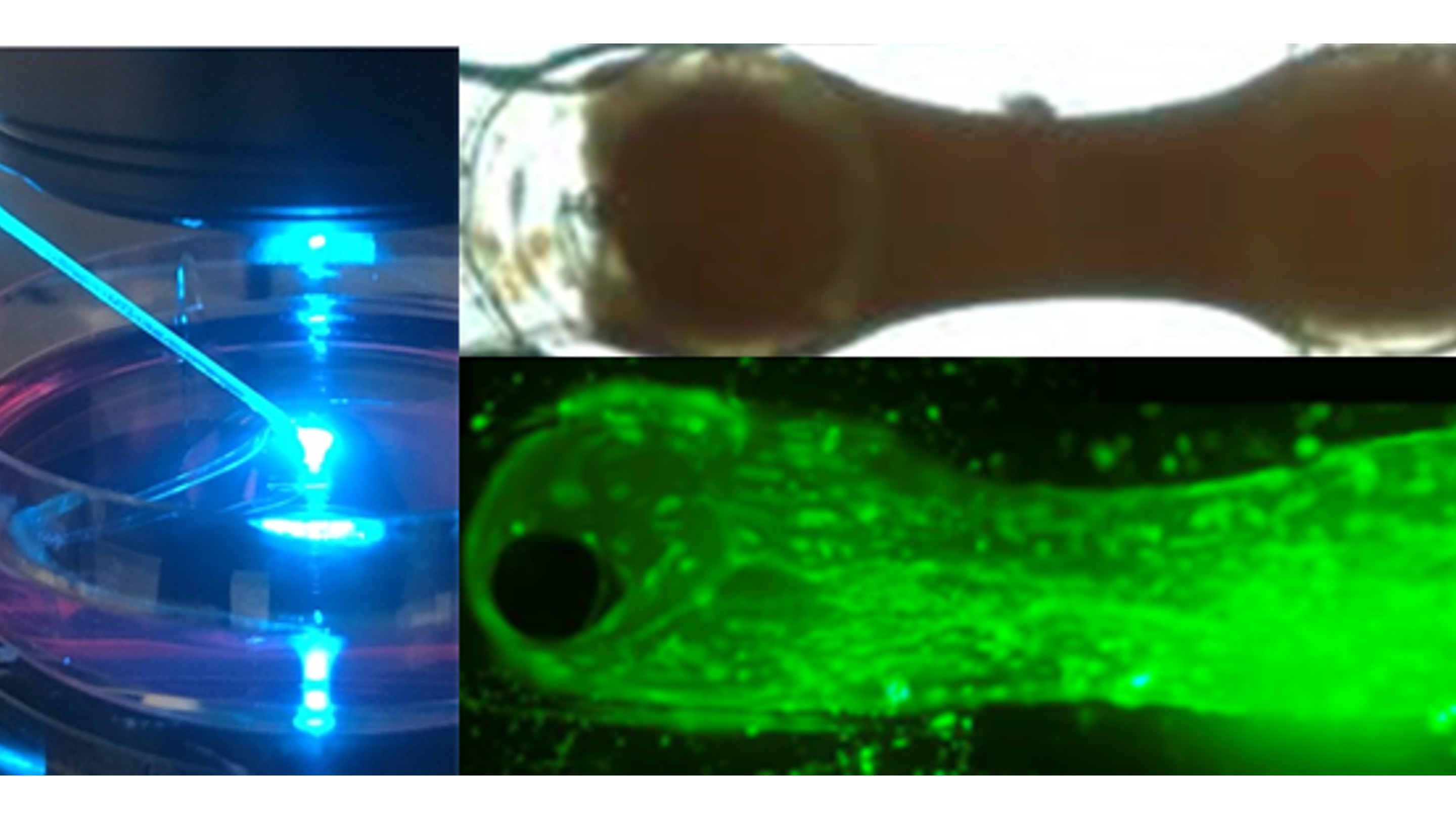
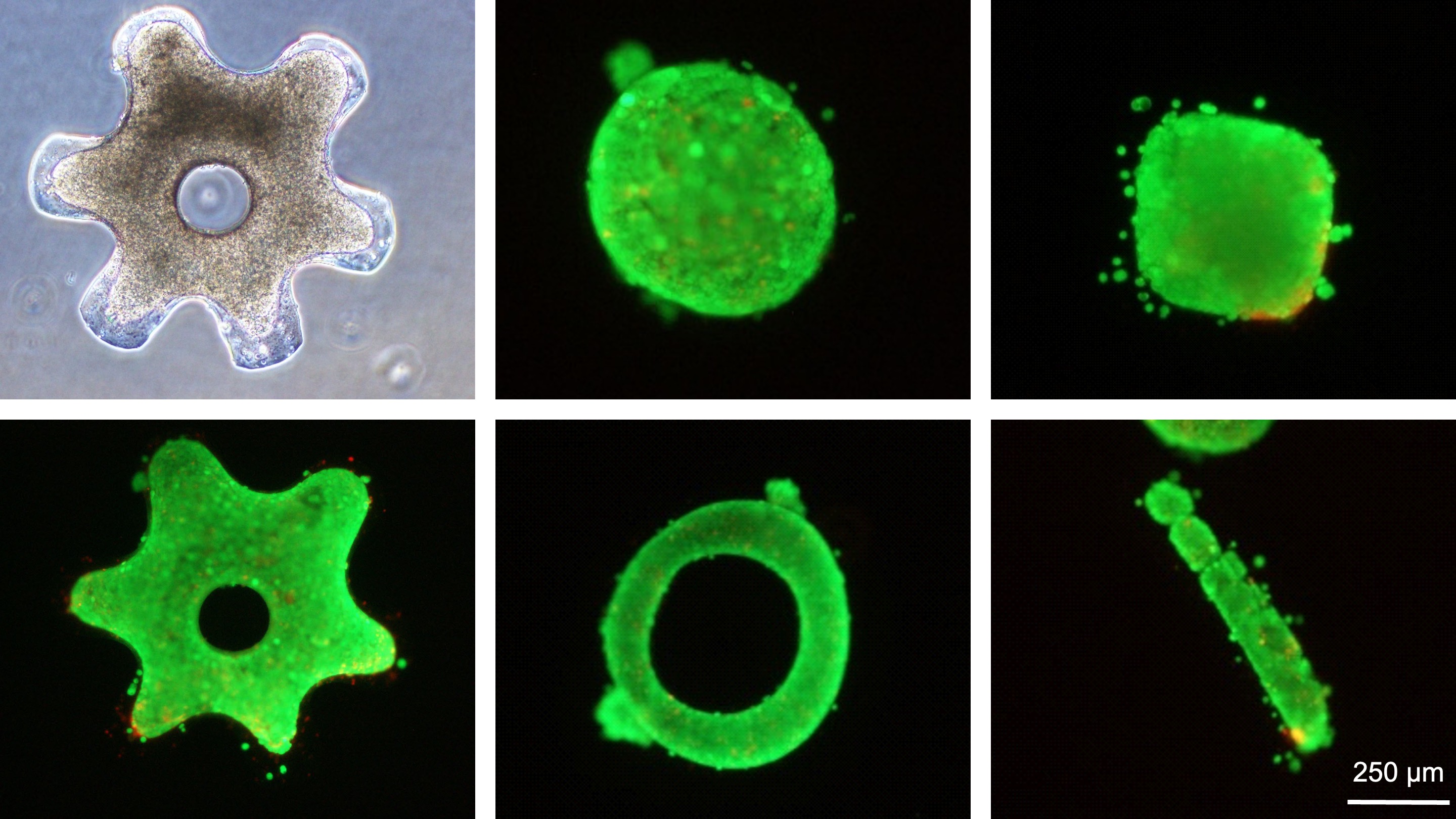
マイクロ・ナノ生体機能デバイス
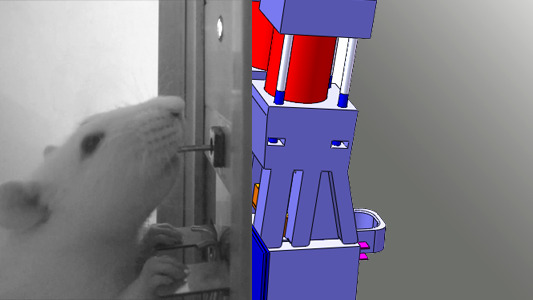
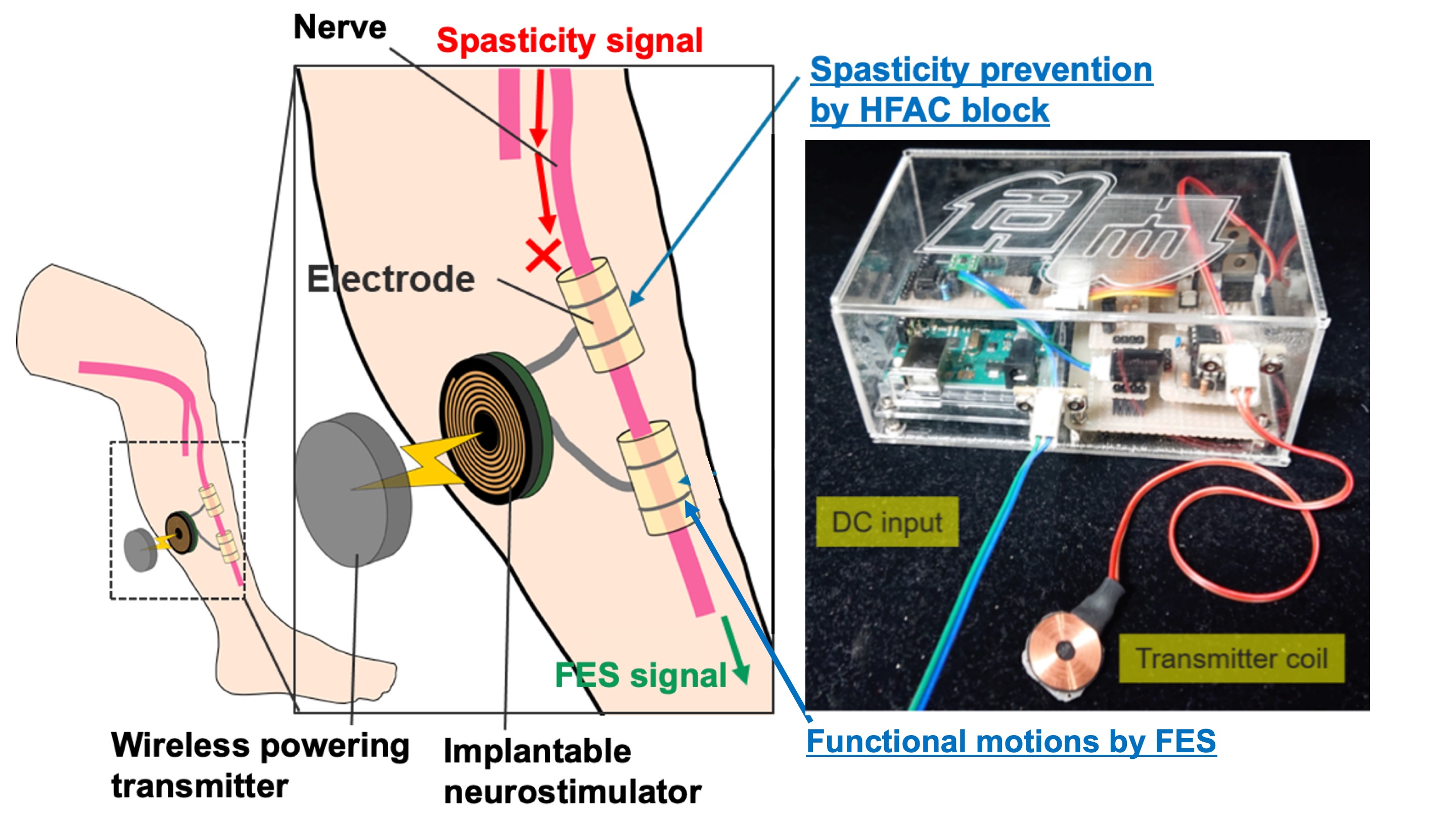
マイクロ・ナノロボット技術を駆使して、生物が有するマイクロ・ナノ構造や機能を模倣及び参照することで、新しい機械システムの実現に向けた研究しています。例えば、サイボーグ技術、バイオプリンティング技術、マイクロ流体チップ技術、セルフアセンブリ技術などの最先端のマイクロ・ナノロボット技術の構築と、生体運動制御や3次元細胞組立てなどへの応用を行っています。

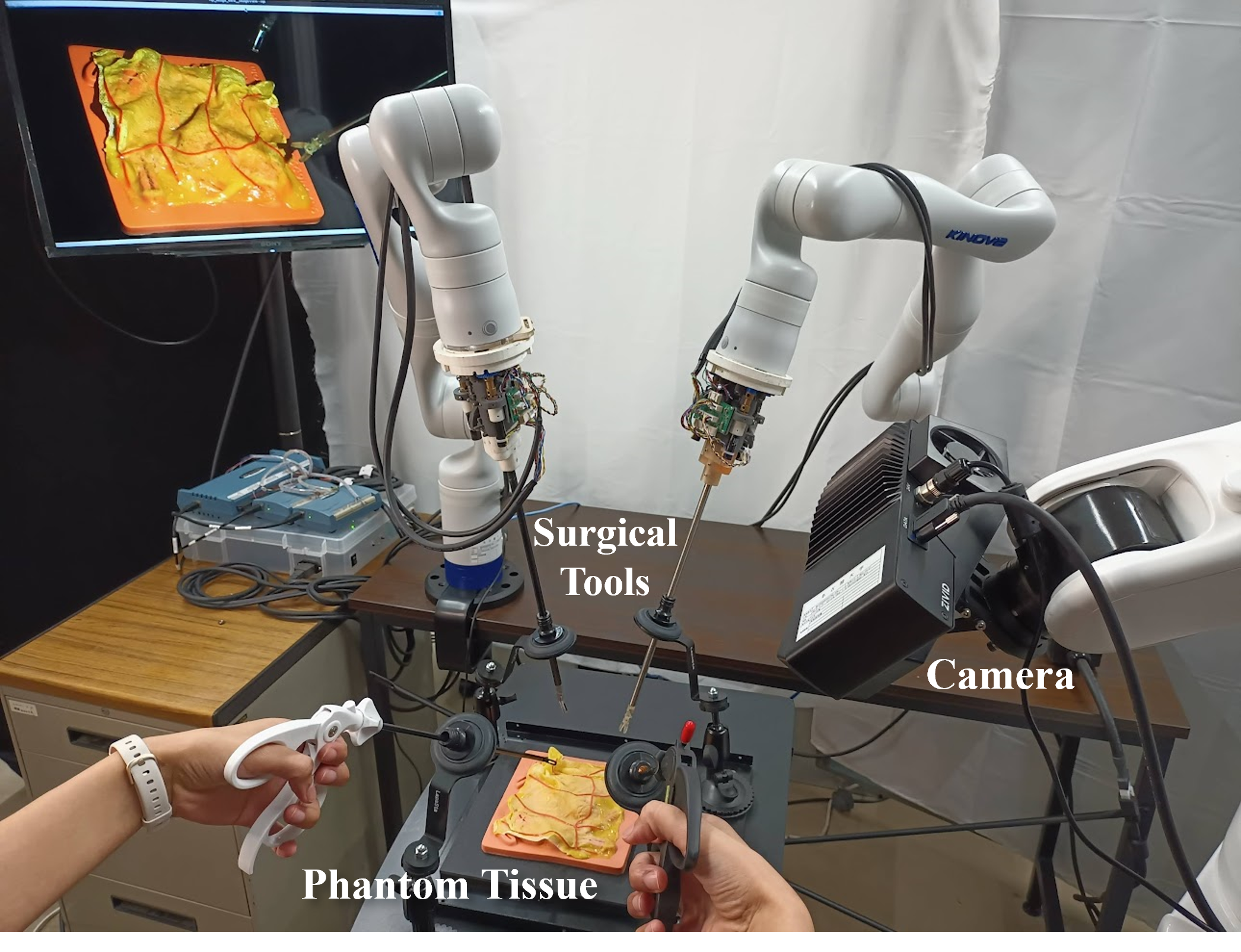
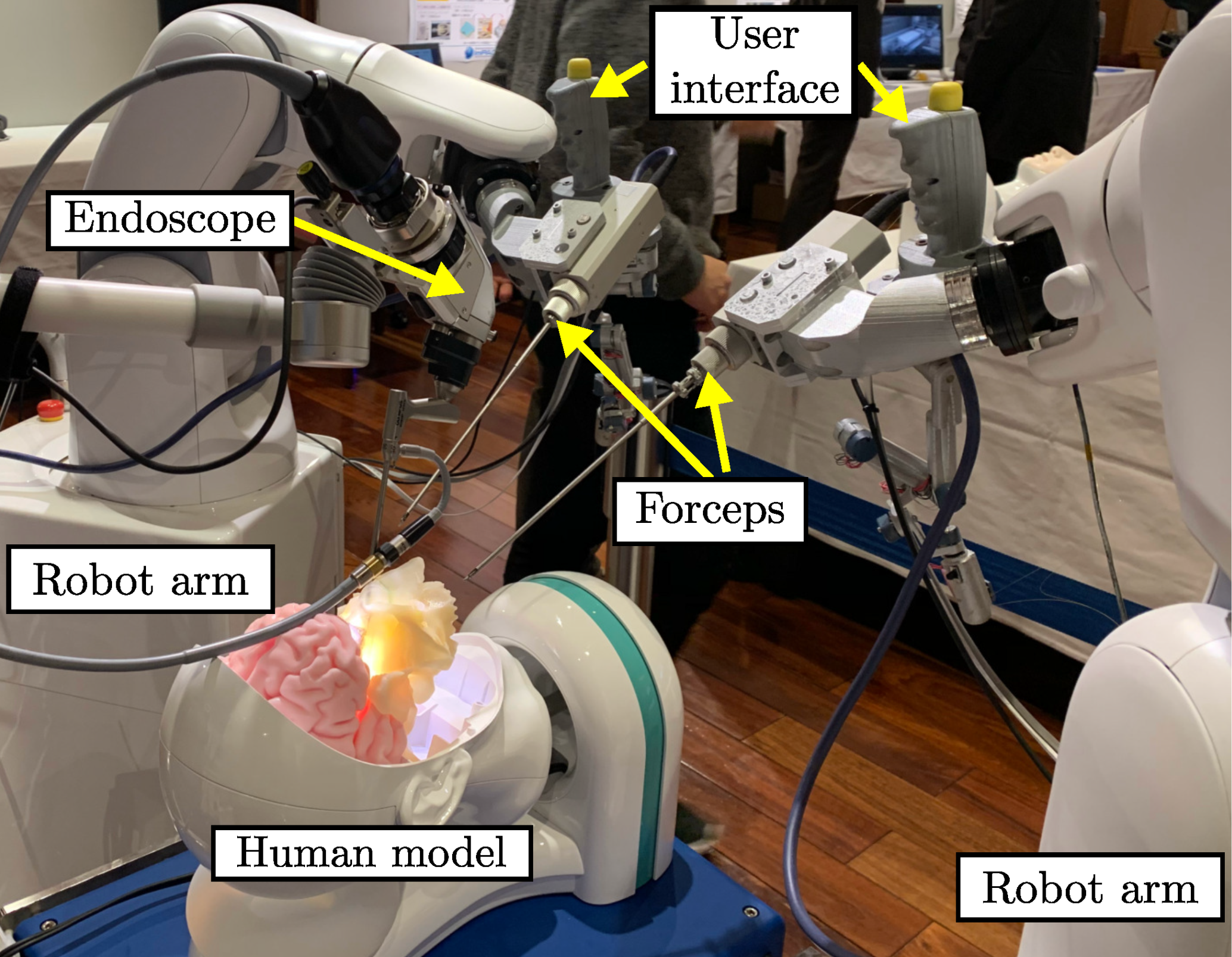
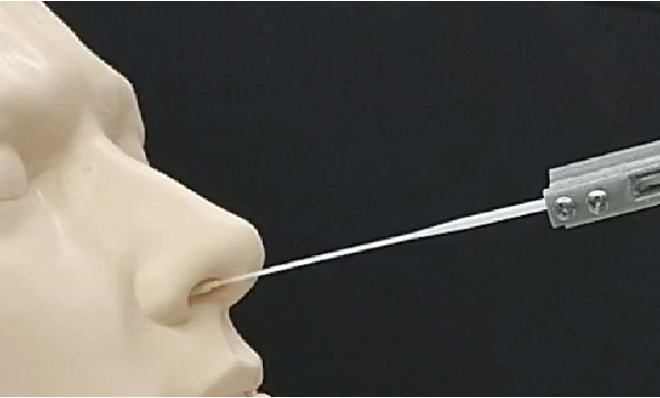
手術支援ロボット
患者に負担の少ない低侵襲で安全な手術を実現する手術支援ロボットの研究を進めております。例えば、拡大経蝶形骨手術を支援する鉗子操作ロボット研究では、鼻から術具および内視鏡を挿入し、狭窄な空間で先端に自由度を有する能動鉗子を直感的に操作するインターフェースおよび操作ロボットを研究開発しております。
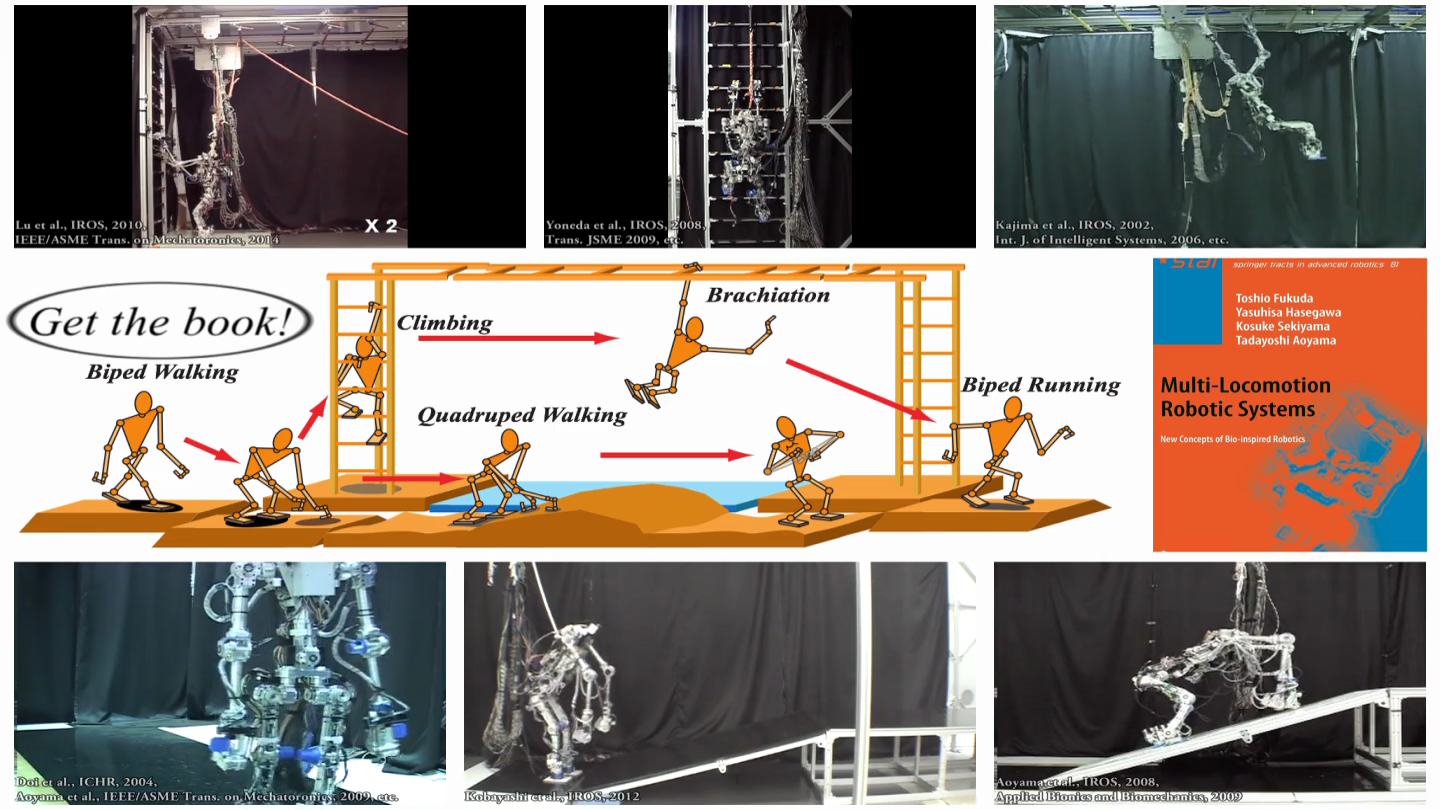
運動制御
人間や従来ロボットの運動性能を超えるロボット制御技術の開発を行なっています。例えば、高速にスティックを回転させるジャグリングを行うロボット、状況に応じて移動形態を変化させ移動するロボットの研究開発を行なっています。