
概要
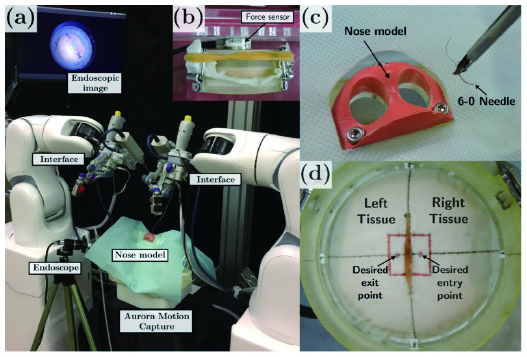
接触センサーで産業用ロボットアームを覆い、多自由度能動鉗子を安全に高精度に操作する経鼻的手術支援ロボットの研究に取り組んでおります。
業績
- Optimization-Based Constrained Trajectory Generation for Robot-Assisted Stitching in Endonasal Surgery, Jacinto E Colan Zaita, Jun Nakanishi, Tadayoshi Aoyama, Yasuhisa Hasegawa, Robotics, 10, 27, 2021
- A cooperative human-robot interface for constrained manipulation in robot-assisted endonasal surgery,Jacinto E Colan Zaita, Jun Nakanishi, Tadayoshi Aoyama, Yasuhisa Hasegawa、Applied Sciences (Switzerland), 10(14). 2020
- A concept of a user interface capable of intuitive operation of 4-DoF articulated forceps,Jacinto E Colan Zaita, Jun Nakanishi, Keisuke Ohara, Tadayoshi Aoyama, Yasuhisa Hasegawa、1-3、International Symposium on Micro-NanoMechatronics and Human Science (MHS), 2017
- A Preliminary Study on Cooperative Force Control based Guidance for Accurate Pre-insertion Positioning of Surgical Instruments,Jacinto E COLAN ZAITA, Yuichiro SATO, Jun NAKANISHI, Yasuhisa HASEGAWA、2A1-O10、ロボティクス・メカトロニクス講演会2017