多自由度術具を操作する適応型ハイブリッドインタフェース
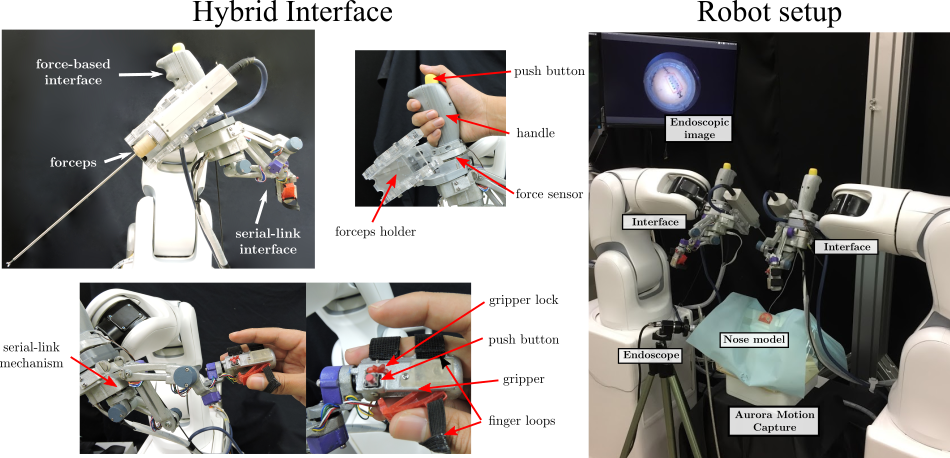
多自由度手術ロボットを操作する力ベースと位置ベースの適応型ハイブリッド・インターフェースを提案している。この適応型ハイブリッド・インタフェースは、ロボットの粗動用に力ベースのインターフェースを、精動用に多関節インターフェースを状況に応じて選択可能である。また、力ベースインターフェースでは、アドミタンスロボット制御の入力として6自由度力/トルクセンサを利用し、多関節インターフェースは、6自由度のシリアルリンクインターフェースとグリッパーから構成される。このハイブリッドインターフェースは、鼻内手術のような幾何拘束のある環境での使用を想定している。
幾何拘束を満たしながら免荷する術具操作機構
この研究では、幾何拘束条件を満たしながら精密な術具操作のために受動的な機構を開発しました。シンプルさ、安全性、コンプライアンスといったパッシブメカニズムの利点を活用し、多様な手術シナリオにおける手術ツールの正確かつ直感的な操作を可能にしています。
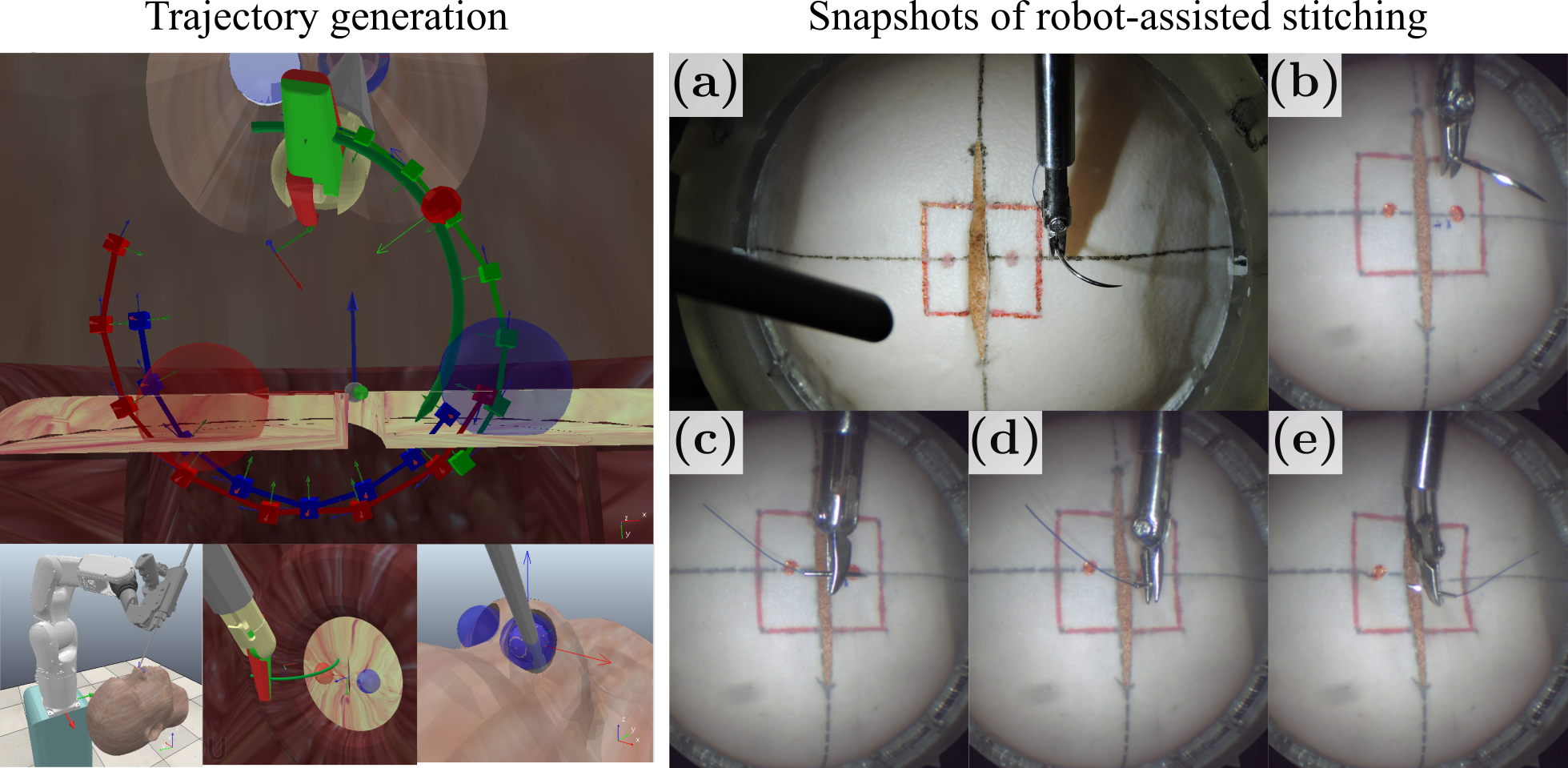
経鼻手術のための手術支援ロボット
本研究では、鼻腔内手術における縫合を支援するロボットのオンライン軌道生成法を提案しました。逐次的凸最適化手法を用いて、縫合針の深さ方向の挿入量、針の曲率、針の出入り口などの要件を満たす軌道を生成します。