概要
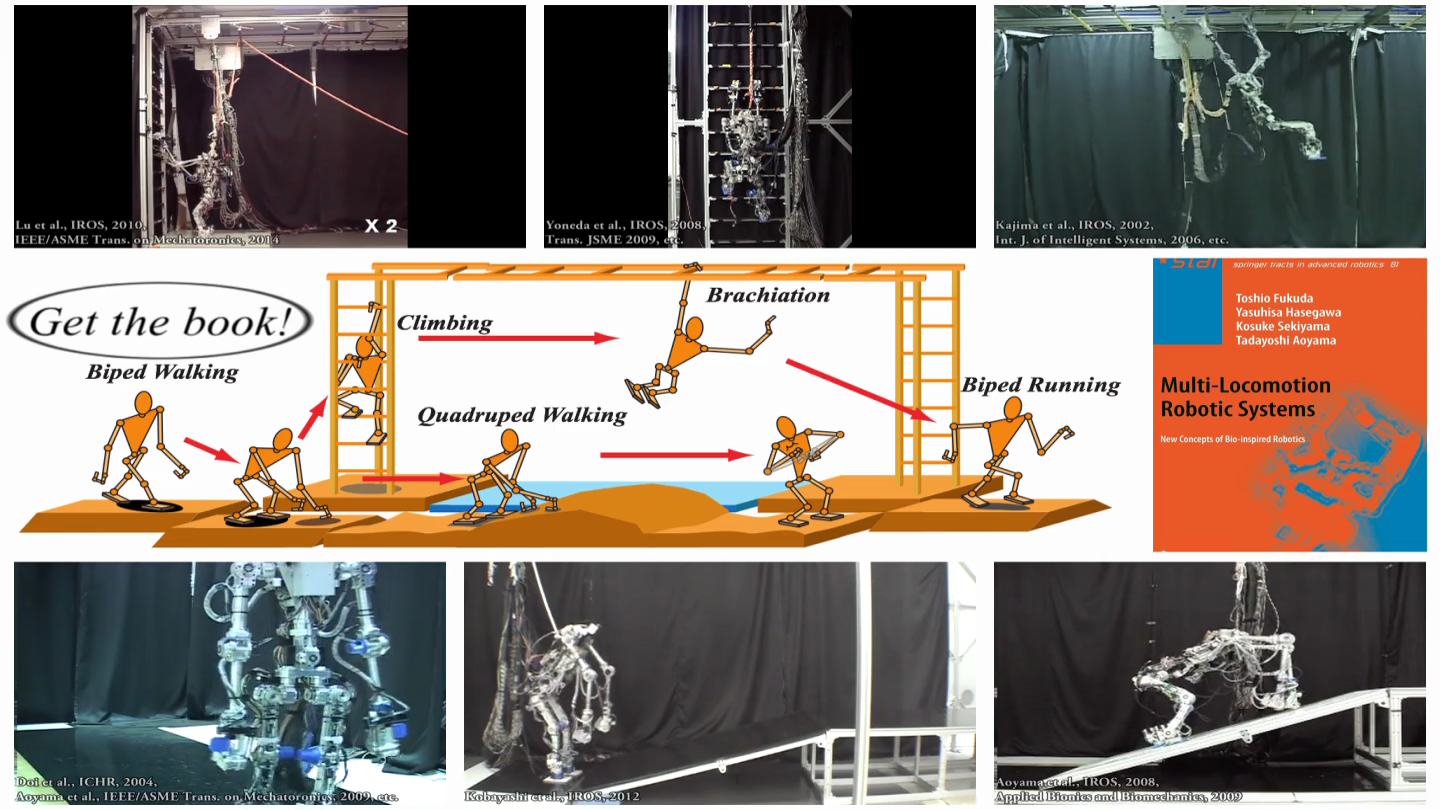
マルチロコモーションロボットは,1台のロボットが複数の移動形態(枝渡り運動・梯子昇降・2足歩行・4足歩行など)を有し,それらから最適なものをロボットの置かれた状況に応じて適宜選択・切り替えることで広範な活動範囲を獲得する,多自由度ロボットです.各移動形態はその運動学及び動力学に関する問題を解決していくことで,その安定性やエネルギー消費量の改善,移動速度の上昇が実現されます.さらに,複数の移動形態を扱う上で,ロボットの置かれた状況に最適な移動形態の自律的な選択が必要とされるため,各移動形態の価値を正しく見積もる手法を研究しています.また,この選択後の切り替えを容易にするため,移動形態の制御手法を統一する研究も行っています.
業績
- Multi-locomotion robotic systems: new concepts of bio-inspired robotics, T Fukuda, Y Hasegawa, K Sekiyama, T Aoyama, Springer, 2012.
- Cane-supported walking by humanoid robot and falling-factor-based optimal cane usage selection, T. Kobayashi, K. Sekiyama, T. Aoyama, and T. Fukuda, Robotics and Autonomous Systems, Vol. 68, pp. 21–35, 2015
- Selection algorithm for locomotion based on the evaluation of falling risk, T. Kobayashi, T. Aoyama, K. Sekiyama, and T. Fukuda, IEEE Transactions on Robotics, Vol. 31, No. 3, pp. 750–765, 2015
- Selection of two arm-swing strategies for bipedal walking to enhance both stability and efficiency, T. Kobayashi, K. Sekiyama, T. Aoyama, Y. Hasegawa, and T. Fukuda, Advanced Robotics, 2016 (online first)
- Adaptive speed controller using swing-leg motion for 3-D limit-cycle-based bipedal gait, T. Kobayashi, T. Aoyama, Y. Hasegawa, K. Sekiyama, and T. Fukuda, Nonlinear Dynamics, 2016 (online first)
- Unified bipedal gait for walking and running by dynamics-based virtual holonomic constraint in PDAC, T. Kobayashi, Y. Hasegawa, K. Sekiyama, T. Aoyama, and T. Fukuda, IEEE International Conference on Robotics and Automation (ICRA),pp. 1769-1775, 2016